


























10
R
OBOT
C
OMPONENTS
T
ILT
, R
OLLOVER
,
AND
T
EMPERATURE
S
ENSORS
5.5 Tilt, Rollover, and Temperature Sensors
These sensors are located on the main circuit board
inside of the electrical box.
Tilt Sensor -
The tilt sensor detects the angle of the
slope on which the robot is working. If this angle
exceeds 30° (58%), an alarm will be raised and the
robot will stop moving.
Rollover Sensor
- The rollover sensor detects if the
robot has been tipped upside down.
Temperature Sensor
- The temperature sensor
measures the ambient outdoor temperature. It will
prevent the robot from operating if the temperature is
too low. The minimum temperature is a programmed
operating parameter.
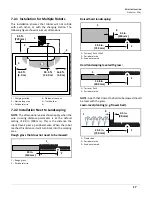
5.6 Cutting Head
The robot has five cutting head assemblies.
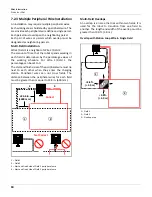
5.7 Charging Station Components
1 – Bracket unit
5 – Anti friction disc
2 – Cable gland
6 – Cutting blade
3 – Motor case
7 – Lower stay
4 – Blade disc
8 – Upper stay
1
3
2
4
5
6
7
8
1 – Enclosure top
2 – Debris cover
3 – Charging arm
4 – Enclosure base
5 – Input panel / Serial number location
4
3
2
1
4
3
2
1
5
5







































































