
User Manual
Smart X (50A / 100A)
Brushless Speed Controller
03121571V3 / 03121573V3
Thanks for purchasing our SMART X Electronic Speed Controller (ESC). High power system for RC
models can be very dangerous, so please read this manual carefully. In that we have no control
over the correct use, installation, application, or maintenance of our products, no liability shall be
assumed nor accepted for any damages, losses or costs resulting from the use of the product.
Any claims arising from the operating, failure or malfunctioning etc. will be denied. We assume no
liability for personal injury, property damage or consequential damages resulting from our products
or workmanship.
As far as is legally permitted, the obligation to compensation is limited to the invoice amount of the
affected product.
1, Brake:
*Off / Soft / Hard / Very hard
2, Battery Type:
*LiPo / NiMH
:
*Soft cut / Hard cut. Soft means gradually reduce the output power. Hard means cut off the output immediately.
:
Off / Low / *Middle / High / Customized: 2.8V~25.2V
,
Step: 0.1V
Before using a new ESC, you need to check all the connections to make sure they are correct and reliable before connecting the ESC to the battery. When ensured everything is ok, then start the ESC in the
following
sequence
:
1, Move the throttle stick to the bottom position (throttle value=0%), then turn on the transmitter;
2, Connect the battery pack to the ESC, then the ESC starts self-test; the motor issues “
♪
123” indicating the system is powered on, and N short “beeps” indicating the amount of LiPo cells of the battery pack,
then a long “beep—“indicating the self-test is completed successfully and the system is ready to fly.
• If no response is received, please check the battery and battery connections to ensure they are ok and reliable.
1. Warning tone for abnormal input voltage
:
when powered on the ESC, it will start testing the input voltage.
I
f the voltage is not in the normal scope, the motor will emit the warning “beep beep, beep beep,
beep beep” till the voltage returns to normal (the time interval among each group of “beep beep” is 1 second).
2. Warning tone for throttle signal loss
:
when detected no throttle signal, the ESC will issue the following warning: “beep-, beep, beep-” (the time interval among these “beeps” is 2 seconds).
3. Warning tone if the throttle stick is not at the bottom position when the ESC is powered up
:
When the throttle is not at the bottom position, the ESC will issue the following warning:
“beep-beep-beep-beep-beep-” (every “beep” is very short and hurried).
- High-performance microprocessor with the operating frequency up to 50MHz brings excellent compatibility (with most motors in the market) and high driving efficiency.
- The maximum motor speed can reach 210000 RPM (for 2-poles), 70000 RPM (for 6-poles) and 35000 RPM (for 12-poles).
- Multiple flight modes: Airplane Fixed Wing / Heli Governor Off / Heli Governor (Elf ) / Heli Governor Store.
- Adjustable throttle range, compatible with various transmitters. It brings smooth, soft & linear speed adjustment and rapid throttle response.
- Microprocessor powered by independent DC regulator has better anti-interference performance, which greatly reduces the risk of losing control.
- Built-in high-efficient & high-power (switch mode) BEC can make the output voltage switched among 5.2V / 6.0V / 7.4V / 8.4V.
(For the specific output voltage, please refer to the parameter list .)
- Brand new governor program, easy to operate; and its excellent speed-governing effect can make big rotor blades more stable even under rapid load change.
- "Restart in auto rotation" can manually interrupt the auto rotation and quickly restart the motor to avoid crashes caused by incorrect operations.
- Independent output port for RPM (that is: motor speed) signals.
- Compatible LCD program box
(optional accessory)
, its simple and visual interface allows users to set/revise all the ESC parameters easily.
(For detailed information, please refer to User Manual of LCD Program Box.)
- Upgradeable firmware, you can upgrade the ESC after connecting it to a PC via the USB cable on the program box.
- The independent port, for connecting the program box and setting parameters, can also be the output port of the running status data of the ESC. When coordinating with the data transmission
module, it can make the real-time data monitoring and logging possible.
- Multiple protection features including input voltage abnormality protection / low-voltage cutoff protection / throttle signal loss protection effectively prolong the service life of the ESC.
1)
When set as “LiPo battery”, the ESC will automatically calculate the cutoff threshold of the battery pack according to the amount of LiPo cells. The low / middle / high cutoff voltage per cell is 2.85V / 3.15V /
3.30V. For example, when using a 3S LiPo, if set the cutoff voltage as “middle”, the cutoff threshold of this battery pack should be 3.15×3=9.45V.
2)
When set as “NiMH battery”, then the low / middle / high cutoff voltage is 50% / 62.5% / 75% of the initial input voltage (at boot/starting up) . For example, when using a 6-cell NiMH battery pack,
the voltage at starting up is 1.44×6=8.64V; and if set the cutoff threshold as “low”, the cutoff threshold of this battery pack should be 8.64×50%=4.3V.
3)
When set as “Customized: 2.8V~25.2V”, the cutoff threshold of the battery pack can be precisely set (the precision can reach 0.1V). But you need a LCD program box (optional accessory) or USB cable on
the LCD program box to connect the ESC to a PC, then set relevant parameters via a special program
(
Hobbywing USB
Link Software
).
5, Flight Mode: Airplane Fixed Wing / Heli Governor Off / *Heli Governor (Elf) / Heli Governor Store
1) Airplane Fixed Wing:
The motor starts to spin at 5% throttle, then speeds up quickly and reaches the full speed from standstill in 300μs. In this mode, the ESC will be enforced to set the “Auto Rotation
Restart Time” to “OFF”.
2) Heli Governor Off:
When the motor starts at 5% throttle, the startup is very soft and it takes 11 seconds to reach the full speed from standstill. In this mode, if the transmitter is in NORMAL state, then
usually the throttle curve is a slash (the start point is the lowest point / 0% throttle, the end point is the highest point / 100% throttle of the throttle range. And this throttle curve is often used by
beginners). As the start point is only 5% of the full throttle, the motor rotates slowly that greatly reduces psychological pressure for beginners, so pilots can select this mode for basic practices like
“frog leap”. In this mode, the ESC will automatically set the “Auto Rotation Restart Time” to “Off”.
3) Heli Governor (Elf) & Heli Governor Store:
The motor only starts at 40% (or above) throttle (in governor mode, the motor won’t start when the throttle value is within 0%-40%); its startup is very soft
and needs 11 seconds to reach the full speed from standstill. Besides, it has speed-governing function (works at 40%-100% throttle). As the motor rotates quickly in “governor” mode, so it isn’t suitable
for beginner anymore but experienced pilots. In these two modes, the setting about “Auto Rotation Restart Time” comes into effect (please refer to “Auto Rotation Restart Time” for more information).
4) Heli Governor (Elf) & Heli Governor Store
have different ways of storing target rev data. In “Governor Store” mode, the data are saved into the FLASH of the microprocessor (and the data won’t disappear
after powered off ); while in “Governor (Elf )” mode, data of the nominal target rev are saved into the RAM of the microprocessor (and the data will disappear after powered off ).
• In “Governor (Elf )” mode, the ESC will automatically start the RPM standardization & regain the target rev data after powered on.
• In “Governor Store” mode, if it needs to re-standardize the target RPM, pilots must modify and save the flight mode as any option except "Heli Govornor Store"first (without restarting the ESC at this
moment), then modify and save it as "Heli Govornor Store"; the ESC will enter the RPM standardization and regain the target RPM data after it’s powered on. After the first activation of the
“speed-governing” function or changed accessories (like motor, battery cells amount, gear and different type of main/big rotor blades) on the plane, pilots need to standardize the RPM again next time.
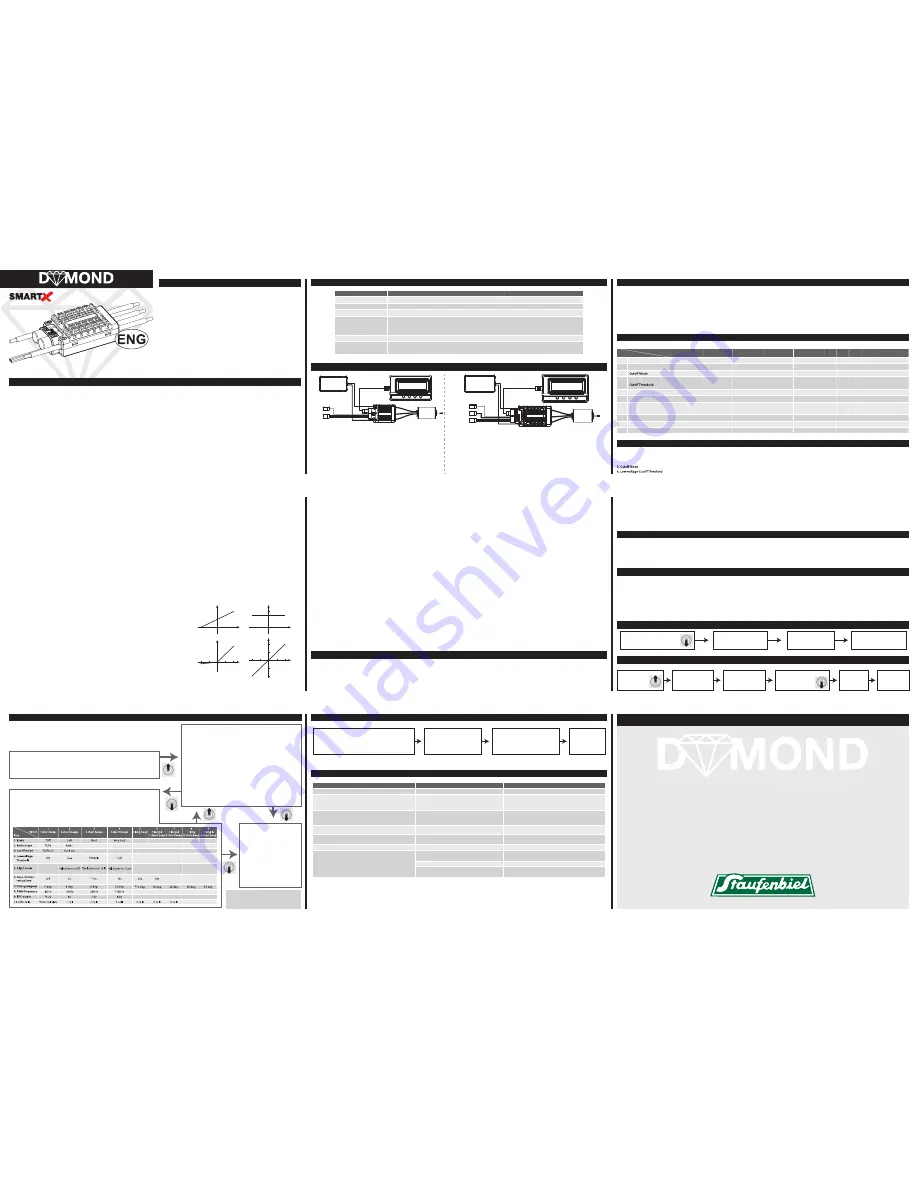
Smart X 50A:
•
The tricolor (WRB) cable here is the throttle cable
(
WHITE: th
rottle signal wire, RED: BEC output wire, Black: ground wire);
•
The thin Orange wire is for RPM signal output;
•
The 3-pin port (marked with - + P) is an independent port for parameter setting;
it can connect the LCD Program Box, or be the output port of running status data
of the ESC.
Smart X 100A
•
The tricolor (WRB) cable here is the throttle cable
(
WHITE: th
rottle signal wire, RED: BEC output wire, BLACK: ground wire);
•
The bicolor (RB) cable here is the BEC cable (RED: BEC output wire, BLACK: ground wire);
•
Hence, there are 2 Black wir
es & 2
Red wires are connected in parallel to the output end of the BEC to make the
higher current get through;
•
The thin Orange wire is for RPM signal output;
•
The 3-pin port (marked with - + P) is an independent port for parameter setting; it can connect LCD Program
Box, or be the output port of the ESC running status data. 2 pins corresponding to “+”
&
“-” in the program port
are also connected to the output end of the built-in BEC, so that it can power the cooling fan of the ESC.
Smart X series speed controllers have independent output ports / interfaces for RPM signals, so it can connect to flybarless systems like Mikado V-Bar as RPM signal source. Undoubtedly, this reduces
peripheral devices which need to be connected to the flybarless helicopter and simplifies the wiring.
DECLARATION
BEGIN TO USE A NEW BRUSHLESS ESC
EXPLANATIONS FOR WARNING TONE
1. Startup Protection
:
the ESC will shut down the motor after failed to start the motor normally in 2 seconds by increasing the throttle value, then you need to move the transmitter throttle stick to the
bottom position again and restart.
(Causes to this problem
:
poor wire connection between the ESC and the motor or disconnection of some output wire, propellers are blocked by other objects, gears are blocked and cannot move and etc.)
2. Overheat Protection
:
When the internal operating temperature exceeds 110 Celsius degree, the ESC will reduce its output power and start protection; it won
’
t cut off the output, but reduce it to 50% to
ensure that the motor still has some power for avoiding crash caused by insufficient power. And the ESC will gradually resume its maximum power after the temperature returns to the safe level.
3. Throttle Signal Loss Protection
:
When detected the signal loss for over 0.25 second, the ESC will cut off the output immediately to avoid even greater loss which may caused by the continuous high-speed
rotation of propellers or rotor blades.
4.
Overload Protection
:
The ESC will cut off the power or restart automatically when the load suddenly increases to a very high value. And the common cause of load soar is the lockout of propellers.
EXPLANATION FOR OTHER PROTECTIONS
PROGRAMMABLE ITEMS
FEATURES
OUTPUT PORT FOR RPM SIGNALS
SPECIFICATIONS
Model
Main Application
Battery Count
Cont. / Burst Current
Planes and 480-550 heli (425-550mm blade)
2-6S Lipo, 5.2V-25.2V
100A /150A (burst in 10 sec)
2-6S Lipo, 5.2V-25.2V
50A /75A (burst in 10 sec)
Planes and 450 & 450L heli (325-380mm blade)
49g / 48mm x 30mm x 15.5mm
Switch M
ode BEC, 6.0V / 7.4V / 8.4
V; Cont.: 10A, Burst: 25A
BEC has the cut-through protection (which means the battery voltage
won
’
t get through to the receiver if the BEC is accidentally damaged)
BEC Output
Switch M
ode BEC, 5.2V / 6.0V / 7.4V
Cont.: 7A, Burst: 15A
I
nput / Output Wire
I
nput: 12AWG / Output:12AWG
Input: 14
AW
G / Output: 14
AWG
Weight/Size
104g / 70mm x 35mm x 21mm
(
W/O Fan
)
110g / 70mm x 35mm x 32mm
(
With Fan
)
“*”in the form below indicate factory defaults.
“*”in explanations below indicate factory defaults
.
Item
1
1
2
3
4
5
6
7
8
9
10
2
3
4
5
6
7
8
9
10
Option
*Off
*LiPo
*Soft cut
Soft
NiMH
Hard cut
Hard
Heli Governor Store
15sec
*Heli Governor (Elf )
*10sec
Customized:
2.8V-25.2V, Step:0.1V
90sec
5 cells 6 cells
4 cells
18deg
30deg
22deg 26deg
Customized:
0deg-30deg, Step:1deg
*15deg
8deg
12deg
4deg
30sec
5sec
*32KHz
8.4V
3 cells
Very hard
High
*Middle
24K
Hz
7.4V
2 cells
16KHz
6.0V
1 cells
Heli Governor Off
Low
8KHz
*5.2V
*Auto calculate
0deg
Airplane Fixed Wing
Off
Off
PWM Frequency
BEC Voltage
Lipo Cells
Advanced Timing
Auto Rotation Restart Time
Flight Mode
Low-voltage
Battery Type
Brake
NORMAL START-UP PROCESS
WIRING DIAGRAM
PROGRAMMABLE ITEMS
curve. E.g. set the throttle curve in IDLE1 / IDLE2 / IDLE3 mode to 65% / 75% / 85% respectively to experience different RPM, and then adjust the value according to the actual situation or preference.
5)
As the battery voltage decreases & the pitch of main rotor blades varies in flight, so we recommend setting the throttle curve between 60%~85% (here we strongly suggest not set the value exceeds 85%) on
the transmitter to guarantee the speed -governing effect and sufficient compensating room to keep the motor’s constant speed. If still can’t reach that target rev when the throttle value exceeds 85%, please
change the motor pinion.
6)
For guaranteeing the speed-governing effect, we strongly recommend setting the PWM frequency as 32 kHz.
6, Autorotation Restart Time: Off / 5s / *10s / 15s / 30s / 90s.
This parameter is only used in “Governor (Elf )” and “Governor Store” modes, and works when the throttle value is within 5%~40%.
During the period of auto rotating (to land), pilots still have the chance to cancel the operation by interrupting the process and restarting the motor quickly. E.g. when set the parameter to 10 seconds,
enabling the throttle HOLD switch (to activate the throttle protection) in flight, the motor will cut off the output and let the helicopter land. While, if you want to end this process immediately, then you need
to “unlock” the HOLD switch (to exit the throttle protection) and increase the throttle value to over 40%, and the ESC will temporarily switch the acceleration time to 1.5 seconds (that is: it reaches the full
speed from standstill in 1.5s) and output power quickly. This action protects the helicopter from crashing caused by the motor’s slow acceleration. However, if “lock” the throttle HOLD switch over 10 seconds,
the ESC will still output power slowly at a super soft acceleration rate (that means it will take 11s to reach the full speed from standstill) even if you “unlock” the throttle HOLD switch and increase the throttle
value promptly.
Security Warning: For safety, please pay attention to the following points.
• When the landing process ends early and the helicopter gets back to ground before the “autorotation restart time”, it’s prohibited to “unlock” the throttle HOLD switch before disconnecting the battery.
Otherwise, the helicopter may rotate and accelerate to a high speed in 1.5s and cause accidents. E.g., if “unlock” the throttle HOLD switch in the “Auto rotation restart time” with the helicopter is still in “IDLE”
mode, main rotor blades will spin rapidly and the helicopter may drift and tilt even on the ground.
• If switch the flight mode from “IDLE” to “NORMAL” and move the throttle stick to the bottom position (0% throttle) or “lock” the “Throttle Cut” switch on the transmitter, main rotor blades will not rotate even if
you accidentally “unlocked” the throttle HOLD switch.
• In “governor” mode, if set “Auto Rotation Restart Time” to “Off”, the motor will always restart at the super soft acceleration rate (it takes 11 seconds to reach the full speed from standstill). Please attention!
7, Advanced Timing: 0deg / 4deg / 8deg / 12deg / *15deg / 18deg / 22deg / 26deg / 30deg / Customized: 0deg~30deg, step: 1 deg.
In general, the low timing works fine for most motors. While as great differences exist among motors, so please try different timing(s) to get the best driving effect. For increasing the speed, you can set the
timing higher. After the timing adjustment, we recommend having a trial on the ground first, and then fly in the sky.
8, PWM Frequency: 8KHz / 16KHz / 24KHz / *32KHz
The rise of PWM frequency can make the motor driving smoother and the noise lower; certainly, this will bring more switching loss for the MOSFET & more heat to the ESC.
9, BEC Voltage: *5.2V / 6.0V / 7.4V / 8.4V
For Smart X 50A ESCs, the BEC output voltage is selectable among 5.2V / 6.0V / 7.4V; and the actual output will be 7.4V even if you selected 8.4V as the nominal output.
For Smart X 100A ESCs, the BEC output voltage is selectable among 6.0V / 7.4V / 8.4V; but the actual output will be 6.0V even if you selected 5.2V as the nominal output.
10, LiPo Cells: *Auto calculation / 1 cell / 2 cells / 3 cells / 4 cells / 5 cells / 6 cells
The parameter is valid only when the battery pack is LiPo. After powered on, the ESC will make the motor beep the amount of cells in your LiPo pack according to auto-detection or cell count manually set.
For Smart X 50A/100A V3 ESCs, the range which can be auto-calculated or manually set is 2~6S; if exceeds, the ESC will warn.
100%
100%
-100%
Throttle (NORMAL)
Neutral
Point
Throttle
Stick
Position
50%
100%
100%
-100%
Throttle (IDLE)
Neutral
Point
Throttle
Stick
Position
50%
100%
12°
-100%
Pitch(IDLE)
Neutral
Point
Throttle
Stick
Position
100%
12°
-100%
Pitch(NORMAL)
Neutral
Point
Throttle
Stick
Position
The example of throttle curve and pitch curve for RPM standardization
Turn on the transmitter and move the
throttle stick to the bottom position
(Throttle value=0%).
Connect battery to the ESC, the
motor will emit “
♪
123” indicating
the ESC is powered on normally.
Then motor emits several
short “beeps” to indicate the
amount of LiPo cells.
And a long “beep” indicating the
system is ready and you can fly the
helicopter or airplane now.
SET THE THROTTLE RANGE
Turn on the transmitter, and
move the throttle
stick to the top
position (full throttle).
Attention
!
It is necessary to reset the throttle range when using a new ESC or changed another transmitter.
Connect battery to the
ESC, and the motor emits
“
♪
123” indicating the ESC is
powered on normally.
2 seconds later, the motor
emits 2 short “beep-beep-”
indicating the top position is
calibrated successfully.
Move the throttle stick to the bottom
position, await 1 second
then the bottom position
is calibrated Successfully.
The motor emits N
beeps to indicate
the amount of
Lipo cells.
Then a long “beep”
indicates the system
is ready and you can
fly the aircraft now.
II, Select Items
After entered the “programming” mode, you can hear 12 sets of tone repeat
sequentially. Move the throttle stick to the bottom position in 3 seconds after the
motor emitted certain set of tone, and then you enter the corresponding item.
1. Brake (1 short) “B”
2. Battery Type (2 short) “BB”
3. Cutoff (3 short) “BBB”
4.
Low-voltage Cutoff Thr
eshold (4 sho
rt) “BBBB”
5. Flight Mode (1 long) “B—”
6. Auto Rotation Restart T
ime (1 long & 1 sho
rt) “B—B”
7. T
iming (1 long & 2 sho
rt) “B—BB”
8. PWM Frequenc
y (1 long & 3 sho
rt) “B—BBB”
9. BEC V
oltage (1 long & 4 sho
rt) “B—BBBB”
10.LiPo Cells (2 long) “B—B—”
11. Reset to Factory D
efault (3 long & 1 sho
rt) “B—B—B—B”
12.Exit (3 long & 2 sho
rt) “B—B—B—BB”
Note:
as 1 long “Beep—” equals to 5 short “beep-”, e.g, in st
ep II
“Select
I
tems” , 1
long & 1 sho
rt (“Beep—Beep”) represents option 6.
4 steps to set parameters via the throttle stick:
I, enter “programming” mode,
II, select item(s),
III, select option(s) / parameters under item(s),
IV, exit “setting”.
PARAMETERS PROGRAMMING/SETTING VIA THE TRANSMITTER
(“*” in the form below indicate factory defaults)
Note: After revised ESC parameters via the transmitter
throttle stick or program card/box, please save those
settings and exit; then the motor emits 5 long
“beep-“ and 5 seconds later you can restart the ESC.
•
I
f the motor doesn
’
t beep after powered on, it means the battery voltage is too low or too high. Please check the battery voltage.
•
I
f the motor sounds “beep-beep-” 2 seconds after powered on, and “
♪
56712 ” 5 seconds later to indicate the ESC is entering the “programming” mode, it means the throttle channel direction in your
transmitter is reversed, in such a case you need to reset the “Normal / Reverse” direction of the throttle channel by referring to the transmitter
’
s manual.
3,
Attention
!
To ensure the ESC fits well with the throttle range on your transmitter, you need to reset the throttle range when using this ESC for the first time or changed another transmitter for the optimum throttle
linearity. For detailed operation, please refer to the explanation in
《
Set the Throttle Range
》
.
Motor
DYMOND
DYMOND
LCD PROGRAM BOX
Battery
THRO
RPM
Smart X 50 A
DYMOND
Smart X 100 A
Motor
DYMOND
LCD PROGRAM BOX
Battery
THRO
RPM
BEC
. .
I, Enter “Programming / Setting” Mode
1. Turn on the transmitter, move the throttle stick to the top position (full throttle);
2. Connect battery to the ESC, then the motor emits “
♪
123” indicating the ESC is powered on normally .
3. 2 seconds later, the motor emits two short “beep-beep- ”;
4. 5 seconds la
ter, the motor emits “
♪
56712” indicating it
’
s already entered the “programming” mode.
. .
III, Select Options / Parameter Values
The motor beeps in loops, move the throttle stick to the top position when heard some “beep(s)” tone
indicating you selected its corresponding option value; then the motor will sound “
♪
1515” means the
value has been saved. (And if you don
’
t want to set other items but quickly exit “setting”, please move the
throttle stick to the bottom position in 3 seconds ; while if you still want to set other items, please wait
for returning to St
ep II and choose other i
tems.
. .
IV, Exit “Setting”
Two ways to exit “setting” mode:
a)
I
n St
ep III, a
fter heard the special tone
“
♪
1515” while selecting optional values,
move the throttle stick to the bottom
position in 2 seconds, then you exit
“setting”.
b)
After hear
d 3 long & 2 sho
rt beeps
which represent item 12 while selecting
options in St
ep II, m
ove the throttle
stick to the bottom position in 3
seconds, then you exit “setting”.
. .
TROUBLESHOOTING
Trouble
Solution
Cause
After powered on, the motor doesn
’
t rotate and there is no sound emitted.
Poor connection between power connectors.
The battery voltage is abnormal.
No signal output from the throttle channel of the receiver.
Didn
’
t move the throttle stick to the bottom position or
the throttle range is too narrow.
I
ncorrect “Normal / Reverse” direction of the throttle channel.
Throttle signal loss protection is activated.
Low-voltage cutoff protection is activated.
Poor wire connections.
Connected ESC output wires to motor wires in the wrong order.
Re-plug or change the connectors.
Please check the battery voltage.
Please check whether the communication between the transmitter
&
receiver is normal or not, and if the control wire (that is, Rx wire) has
been firmly plugged into the throttle channel in the correct direction.
Move the throttle stick to the bottom position or reset the throttle range.
Please refer to the transmitter
’
s user manual and reset the “Normal /
Reverse” direction of the throttle channel.
Please check the communication between the transmitt
er &
receiver,
and also check the connection between ESC and the receiver.
Charge the battery pack or change a new one.
Please check the battery connector and the connection between ESC
output wires and motor wires.
Swap any of two wire connections.
After powered on, the motor doesn
’
t spin, but emits the warning tone
“beep beep, beep beep, beep beep” (the interval between each group of
“beep beep” is 1 second).
The motor stops halfway.
After powered on, the motor doesn
’
t spin but emits the warning tone
“beep-, beep-, beep-” (the time interval each “beep-” is 2 seconds).
After powered on, the motor doesn
’
t run but emits “beep, beep, beep,
beep, beep” (each beep is very short and hurried).
The motor rotates in the wrong direction.
After powered on, the motor doesn
’
t run but emits “beep-beep” then the
special tone “
♪
56712 ”.
. .
II, Select items:
motor starts to sound,
when heard a long “beep—” (which
represent
I
tem #5—flight mode), move
the throttle stick to the bottom
position, then you entered this item
IV, Exit “setting”
:
After
the 3rd step completed,
move the throttle to the
bottom position again
in 2 seconds.
ESC PROGRAMMING SAMPLE
I
n the example below, it set the “flight mode” to “Heli Governor Off” , that is the 2
nd
parameter of item 5.
I, Enter “programming” mode
:
Move the throttle stick to the top
position and then turn on the transmitter, connect ESC to battery, the
motor emits “
♪
123” indicating it
’
s normally powered on. 2 seconds
later, it emits “beep-beep-” and then 5 seconds later it emits “
♪
56712 ”
which indicates it
’
s already entered the “programming” mode.
. .
III, Select Options
:
motor emits a short
“beep-“, 3 seconds later, two short
“beep-beep-“, then move the throttle stick to
the top position, and the motor emits “
♪
1515”
indicating it has set to “Heli Governor Off”.
. .
Airplane
Fixed Wing
Here we suggest pilots take the “Governor Store” mode as their first option to avoid standardizing rev every time.
a) RPM standardization in “Governor (Elf)” mode:
when the throttle value switches to over 40% from 0%, the motor starts in a
super soft way and accelerates slowly; it completes RPM standardization in 11 seconds and then enters the “governor” mode.
After changed batteries, the ESC will standardize the RPM again.
b) RPM standardization in “Governor Store” mode:
when the throttle value switches to over 40% from 0%, the motor starts in a
super soft way and accelerates slowly; it completes RPM standardization in 11 seconds and then enters the “governor” mode.
After flight, please move the transmitter throttle stick to the bottom position, the motor stops spinning and the ESC will save
the standardized (target) RPM into the FLASH. After changed batteries, the ESC will read the target RPM from the FLASH, so
there is no need to standardize the rev again.
c) Example for RPM Standardization:
In this example, we take the neutral point (50%) of the throttle stick as reference points for standardizing RPM.
• Set the throttle curve (throttle value at the neutral point=50%) & pitch curve (the pitch at the neutral point is 0) in “NORMAL”
mode, and keep the throttle HOLD switch “locked” to ensure safety.
• Connect the fully charged battery to the ESC, let the ESC complete the initialization, then move the transmitter throttle stick to
the neutral point (here the throttle value at the neutral point is 50% and the pitch of main rotor blades is 0 degree), and then
“unlock” the throttle HOLD switch; the motor will start from standstill in a super soft way, accelerate slowly and completes the
target rev standardization 11 seconds later.
• Trial flight. If the target rev is too low, then raise the throttle curve; if the target rev is too high, and then lower the throttle
Smart X 100 A
Smart X 50 A
2015, DYMOND MODELLSPORT
Gustav Staufenbiel GmbH
Hanskampring 9
D-22885 Barsbüttel
www.modellhobby.de
Tel.: +49 -40 300 61950
Mail: [email protected]





















































