



























EWM-2SS-DAD/22E-PN
89475/119 ETM
Duplomatic MS
▪
EWM-2SS-DAD/22E-PN Start-up Manual
–
89475-PN/119 ETM --- Mar 2019
23
The manual speed is also limited by the (internal or external) speed demand (MIN evaluation).
CAUTION!
Do not use the manual mode together with the EOUT command.
After the deactivation of the HAND input the output is set to the EOUT value
POSWIN (in-position monitoring range)
Command
Parameters
Unit
Group
POSWIN_1:I X
POSWIN_2:I X
i= S|D
x = 2… 200000
µm
SYSTEM
These parameters are entered in µm.
The POSWIN
2
command defines a range for which the “in position” message is generated.
This function monitors the difference between the command and actual position. If the error is
less than the programmed value, the proper POSWIN bit is set at the STATUS output.
START must be acivated to generate the INPOS messages.
The positioning process is not influenced by this message. The controller remains active.
For this module two di
fferent “in position range” must be defined:
POSWIN:S
Static, is the standard parameter, for monitoring the target position in SDD mode.
POSWIN:D
Dynamic, is used to monitor the following error of NC mode.
VMODE (Selecting the control mode)
Command
Parameters
Unit
Group
VMODE_1
X
VMODE_2
X
x= SDD|NC
SYSTEM
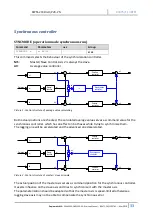
The fundamental control structure can be changed with this parameter.
SDD:
S
troke-
D
ependent
D
eceleration. In this mode, stroke-dependent deceleration is
activated. This mode is the default mode and is suitable for most applications. With
stroke-dependent deceleration the drive comes to a controlled stop at the target
position. From the deceleration setpoint the drive then switches to closed loop control
mode and moves accurately to the desired position. This control structure is very robust
and reacts insensitively to external influences such as fluctuating pressures. One
disadvantage is that the speed varies with the fluctuating pressure as the system runs
under open-loop control.
NC:
N
umerically
C
ontrolled. In this mode a position profile is generated internally. The
system always works under control and uses the following error to follow the position
profile. The magnitude of the following error is determined by the dynamics and the
2
POSWIN:D should always be set greater than POSWIN:S .With POSWIN:D the increasing following error
can be detected (e.g. through high external force). In SDD mode both the signals are equal.
Содержание EWM-2SS-DAD/22E-PN
Страница 1: ...89475 119 ETM EWM 2SS DAD 22E Profinet Interface Digital Card Start up manual Duplomatic MS S p A...
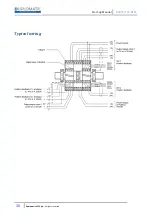
Страница 16: ...Start up Manual 89475 119 ETM 16 Duplomatic MS S p A All rights reserved Typical wiring...
Страница 50: ...Start up Manual 89475 119 ETM 50 Duplomatic MS S p A All rights reserved...







































































