
























Start-up Manual
89475/119 ETM
12
Duplomatic MS S.p.A.
All rights reserved.
Commissioning
Step
Task
Installation
Install the device in accordance with the circuit diagram. Ensure it is wired
correctly and that the signals are well shielded. The device must be installed in a
protective housing (control cabinet or similar).
Switching on for
the
first time
Ensure that no unwanted movement is possible in the drive (e.g. switch off the
hydraulics). Connect an ammeter and check the current consumed by the device.
If it is higher than specified there is an error in the wiring. Switch the device off
immediately and check the wiring.
Setting up
communication
Once the power input is correct the PC (notebook) should be connected to the
serial interface. Please see the EWMPC/20 program documentation for how to set
up communication.
Further commissioning and diagnosis are supported by the operating software.
Pre-
parameterization
Now set up the following parameters (with reference to the system design and
circuit diagrams):
SYSRANGE, SENSOR SETTINGS, POLARITY, ACCELERATION and DECELERATION.
Pre-parameterization is necessary to minimize the risk of uncontrolled
movements.
Parameterize specific settings for the control element (MIN for following error
compensation and MAX for maximum velocity).
Reduce the speed limitation to a value which is uncritical for the application.
Control signals
Check the control signal with a voltmeter. The control signals (PIN 15 to PIN16 and
PIN19 to PIN20) lies in the range of ± 10V. In the current state it should show 0V.
Alternatively, if current signals are used, approx. 0 mA should flow.
CAUTION! This signal depends on the EOUT setting.
Field
communication
Activate the field communication and check whether the right values and bits are
sent to the module.
Switching on the
hydraulics
The hydraulics can now be switched on. The module is not yet generating a signal.
Drives should be at a standstill or drift slightly (leave its position at a slow speed).
Activating
ENABLE
CAUTION! Drives can now leave their position and move to an end position at full
speed. Take safety measures to prevent personal injury and damage.
Drives stay in the current position (with ENABLE the actual position is accepted as
the required position). If the drive moves to an end position, the polarity is
probably wrong.
Activating START With the start signal the demand value on the analogue demand value input is
accepted and the axis moves to the predefined target position.
If START is disabled the axis stops in the preset deceleration distance D:S.
Manual (HAND)
operation
If START is disabled the axis can be moved manually with HAND+ or HAND- .
After disabling the HAND signal, the axis stops in a controlled manner at the
current position.
Optimize
controller
Now optimize the controller parameters according to your application and your
requirements.
Содержание EWM-2SS-DAD/22E-PN
Страница 1: ...89475 119 ETM EWM 2SS DAD 22E Profinet Interface Digital Card Start up manual Duplomatic MS S p A...
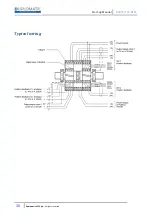
Страница 16: ...Start up Manual 89475 119 ETM 16 Duplomatic MS S p A All rights reserved Typical wiring...
Страница 50: ...Start up Manual 89475 119 ETM 50 Duplomatic MS S p A All rights reserved...