





























Doosan Robotics User Manual v2.6.1
168
9.3
Task Writer Command
The commands available in the Task Writer are
Motion Commands
,
Flow Control and Other
Commands
, and
Advanced Commands
.
•
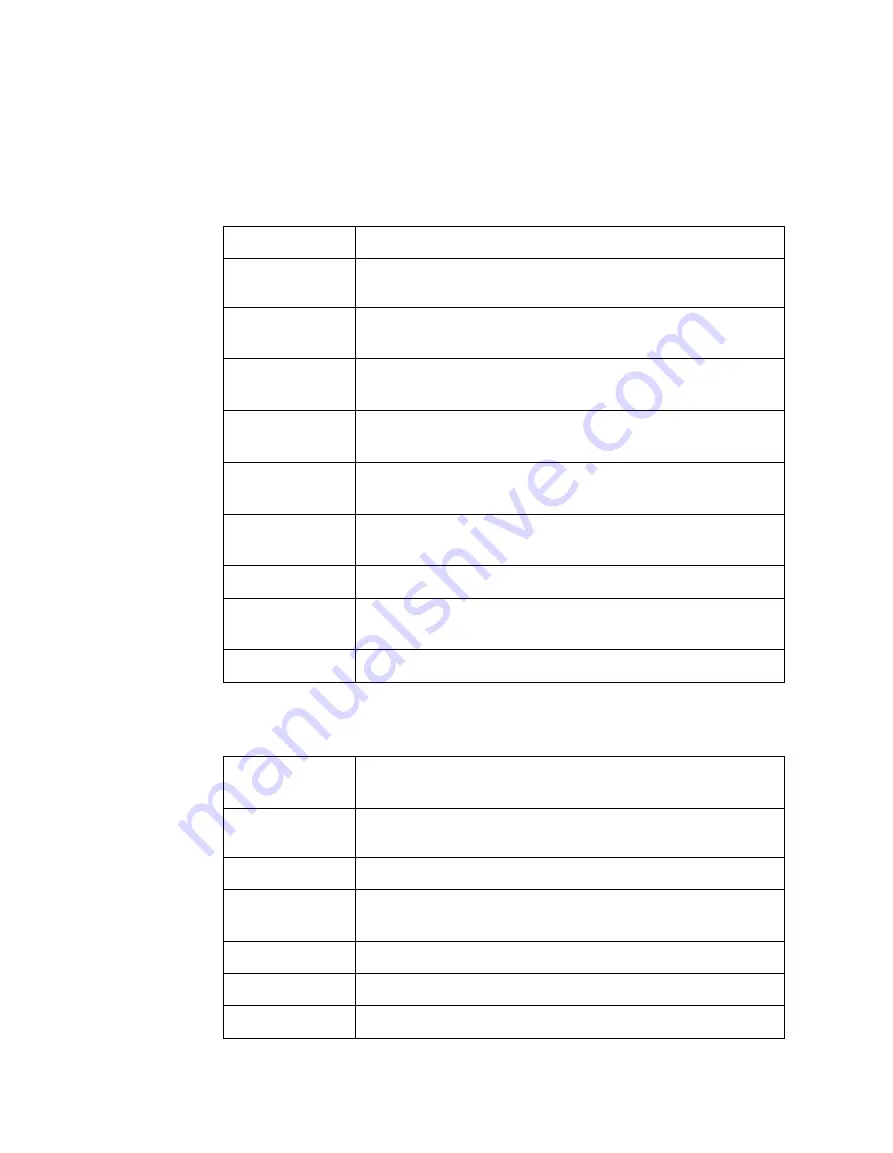
Motion Command
: These are commands used to adjust or change the robot’s pose.
Move J
Used to move the robot to the target joint coordinates.
Move L
Used to move the robot along a line towards the target work space
coordinate.
Move SX
Used to move the robot along a curved line connecting multiple via
points and target points within the workspace.
Move SJ
Used to move the robot along a curved line connecting multiple via
points and target points expressed as a joint coordinate.
Move C
Used to move the robot along an arc composed of a current point,
via point and target point.
Move B
Used to move the robot along a line and arc connecting multiple via
points and target points within the workspace.
Move Spiral
Used to move the robot along a path extending to the outer side from
the center of a spiral.
Move Periodic
Used to move the robot along a path repeated periodically.
Move JX
Used to move the robot to the target workspace coordinate and joint
form. This does not move along a straight line.
Stop Motion
This is used to stop task execution.
•
Flow Control and Other Commands
: These can control the task flow through task standby,
repeat, executing commands included in the task and conditions.
If
This is used to branch according to a specific condition during task
execution.
Else If
This is used to branch according to a specific condition during task
execution.
Repeat
This is used to repeat the task command.
Continue
This is used to return to the first command of a repetition statement
(Repeat).
Break
This is used to exit the repeat execution command (Repeat).
Exit
This is used to end task execution.
Sub
This is used to define a subroutine within the task.
Содержание A0509
Страница 1: ......
Страница 76: ...Doosan Robotics User Manual v2 6 1 76 Tapping the Edit button cannot edit the setting but deletion is possible ...
Страница 117: ...117 Note The configuring end effector and base end effector must be symmetrical on the tool Z axis ...
Страница 121: ...121 7 8 2 Vision For more information about Vision settings refer to the separate Reference Manual provided ...
Страница 214: ...Doosan Robotics User Manual v2 6 1 214 ...
Страница 251: ...251 ...
Страница 252: ...Doosan Robotics User Manual v2 6 1 252 ...
Страница 253: ...253 ...







































































