




























•
•
1.
2.
3.
4.
•
•
-
-
-
-
-
-
-
-
N O T I C E
Do not operate any of the system modules until they are all powered up correctly.
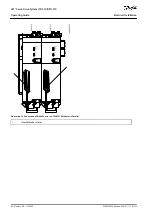
If 2 PSM 510 modules are mounted in parallel, power up both PSM 510 modules simultaneously (within a maximum delay of
1 second).
6.7 System Module Charging Time
The charging time of the system is determined by the longest charging time of each individual system module.
The exact status of each module can be seen via the statusword.
N O T I C E
Do not operate any of the system modules or decentral drives until they are charged up completely. Wait until PSM 510,
DAM 510, and ACM 510 are in state
Operation enabled
, before bringing the ISD 510/DSD 510 into state
Operation enabled
.
Table 25: DC-Link (UDC) Charging Time for PSM 510, DAM 510, and ACM 510
Specification
Unit
PSM 510
DAM 510
ACM 510
UDC charging time
s
2.0
2.0
3.5
6.8 Switching on the ISD 510/DSD 510 System
Complete the cabling of the servo system before applying power to the ISD 510/DSD 510 servo drives. This cabling provides the
supply voltage and the communication signals for the servo system. This is a fundamental requirement for operation of the ISD
510/DSD 510 servo drives.
The servo system can be switched on in 2 ways:
If the Power Supply Module (PSM 510) is supplied with mains, STO, and U
AUX
, communication to the PSM 510 internal controller
is established and DC-link and U
AUX
are automatically passed on via the backlink to the DAM 510 and then passed on further to
the connected servo drives.
If the Power Supply Module (PSM 510) is only powered by U
AUX
, then the PSM 510, DAM 510, and servo drive control units are
running.
6.8.1 Procedure for Switching on the ISD 510/DSD 510 System
Procedure
Switch on U
AUX
power to enable communication to the PSM 510, DAM 510, and ISD 510/DSD 510 servo drives to be estab-
lished.
Switch on the mains.
Set the PSM 510 to state
Normal operation
.
Set the DAM 510 to state
Normal operation
.
Now the PSM 510, DAM 510 and the ISD 510/DSD 510 servo drives are ready for operation.
6.9 Libraries
The libraries provided for the ISD 510 system can be used in:
TwinCAT
®
V2 and V3
SIMOTION SCOUT
®
V5.2:
C240 from V4.4
D410-2 from V4.4
D425-2 from V4.4
D435-2 from V4.4
D445-2 from V4.4
AQ262449648484en-000101 / 175R1135
86 | Danfoss A/S © 2020.08
Commissioning
VLT® Servo Drive System ISD 510/DSD 510
Operating Guide







































































