





























SM-Universal Encoder Plus User Guide
45
Issue Number: 6
www.controltechniques.com
6.3
Simulated encoder outputs
Output initialisation
During power-up the source position may not be valid. The simulator will wait until the
position feedback source has been initialised before using the current position as the
first output position. As a result the SSI output will be held high until the source has
been initialised which will trigger the master to trip on power supply failure. Once
initialised the simulator will not stop even if the source device is re-initialised or trips.
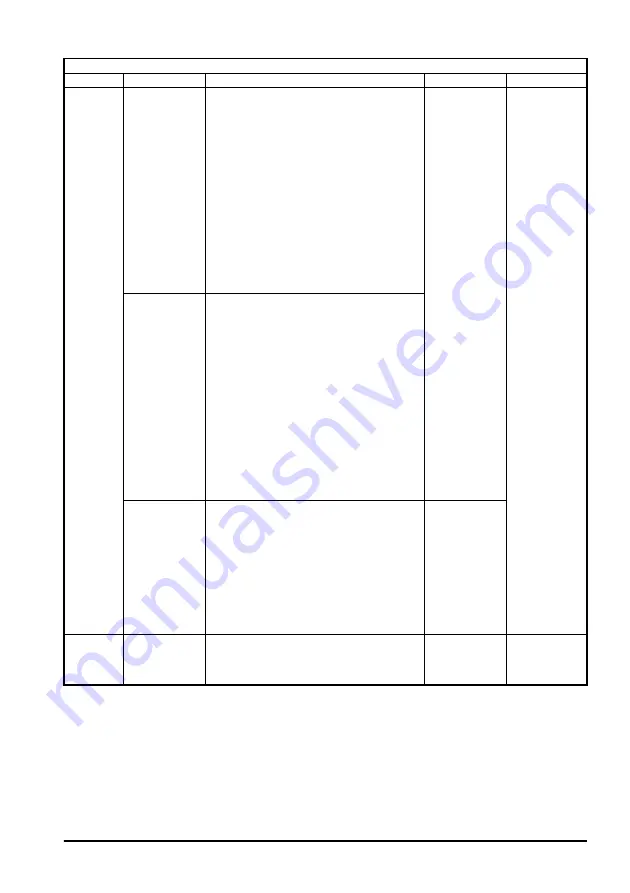
Simulated Encoder Outputs
Type
Details
Output scaling
Update rate
Software
Simulation
Ab
Fd
When a marker is detected by the input source
the marker position based on the non-marker
reset position is transferred within 500
µ
s.The
simulator reacts in 250
µ
s to a change in
marker position sending out a change in
position resulting from the marker correction.
This change could be large when the first
marker input is received. The simulator is
limited to 500kHz, so many 250
µ
s periods at
maximum output frequency could be used if
the position change is large. This system does
not discard lines but could include a delay
before the marker is output while the position
change caused by the first marker input is
output at the maximum output frequency. The
marker is output as normal when the output
position passes through zero.
Scaling available
through both
Pr
x.25
, Pr
x.26
Source
dependant
e.g.
Pr
x.05
= 250
µ
s
Pr
3.29
= 250
µ
s
Pr
x.30
= 4ms
Ab.L
Fd.L
When a marker is detected by the input source
the marker position based on the non-marker
reset position is transferred within 500
µ
s. The
simulator reacts to this change in marker
position in the next 250
µ
s period by sending a
marker out in the next 250
µ
s cycle at the same
location in time within that cycle as the
incoming marker was into the source. N.B.
High A and B (or high F) alignment may alter
the position.
No pulses are discarded from the Ab / Fd
outputs so that the relative speed delta is
always correct. The device receiving the
simulated encoder output signals can correct
it's absolute position using the marker to
become synchronised with the simulation
source.
SSI
Gray Code or
Binary Format
The SSI output position is updated every
250
µ
s, in binary or Gray SSI, with the start bit
high and the power supply alarm bit (the last or
lowest significance position bit) low. In SSI
output the absolute position from the source is
shifted, converted and then placed into a
buffer, here it waits for an SSI master (clock
signal) to transfer and decode the value. The
baud rate for the simulated SSI encoder output
is defined by the clock input from the external
Master.
Shifting available
through both
Pr
x.47
and
Pr
x.48
Hardware
Simulation
H.int
H.drv
The drive or Solutions Modules incremental
encoder inputs are routed directly through to
the simulated encoder output terminals
through hardware.
Scaling not
possible
Minimal due to
hardware
simulation
approx 100ns
Содержание SM-Universal Encoder Plus
Страница 73: ...SM Universal Encoder Plus User Guide 73 Issue Number 6 www controltechniques com ...
Страница 112: ...0471 0005 06 ...