
























10
SM-Universal Encoder Plus User Guide
www.controltechniques.com
Issue Number: 6
SC
In this case the incremental positional information and rotation is determined from the
phase relationship of the analogue sine/cosine feedback signals. The incremental
SinCos encoder can be used when operating in the Closed Loop Vector mode.
* Max input frequency = LPR x max rpm / 60
3.4.2
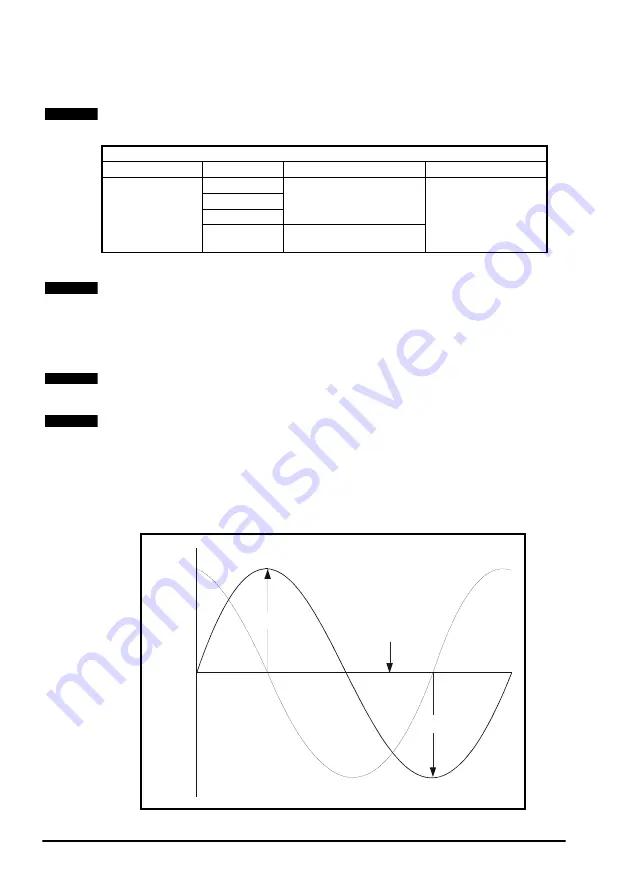
SinCos encoder feedback signals
For the SinCos encoder to be compatible with the SM-Universal Encoder Plus, the
output signals from the encoder must be a 1V peak to peak differential voltage (across
sinref to sin and cosref to cos).
Figure 3-4 Stegmann SinCos encoder feedback signals
Refer to for section 3.4.6
Comms only, (absolute encoders) SSI and EndAt
for further information on the SinCos encoder feedback signals.
NOTE
Limitations
Type
Encoder
Max Input Frequency
Max no. of Lines (LPR)
Incremental
Ab
50,000
Fd
600kHz*
Fr
SC
115kHz* (full resolution)
250kHz (reduced resolution)
The maximum speed in rpm which an encoder connected to the SM-Encoder Plus can
reach can be calculated from:
Max rpm = (60 x Max input frequency) / Encoder LPR
e.g. For a 4096 line encoder the maximum rpm would be:
(60 x 600 x 10
3
) / 4096 = 8789rpm
NOTE
The absolute maximum input frequency for any SC, SinCos encoder used with the SM-
Universal Encoder Plus is 250 kHz.
NOTE
With this type of feedback the Unidrive SP must carry out a phasing test to find the phase
offset angle on power up for operation in servo mode.
NOTE
2.5Vdc
.
0.5 Vdc
0.5 Vdc
SIN
COS
REFSIN,
REFCOS
Содержание SM-Universal Encoder Plus
Страница 73: ...SM Universal Encoder Plus User Guide 73 Issue Number 6 www controltechniques com ...
Страница 112: ...0471 0005 06 ...