





























8.4
Start behavior and boot project
8.4.1
General information
As the drive-integrated control unit runs in parallel as a task, it is initialized
together with the drive. As regards the different communication phases, the
drive-integrated control is also subject to the conventions determined for the
drive firmware.
See also Functional Description of firmware "Device-internal state machine".
8.4.2
Brief description
The drive-integrated PLC (Rexroth IndraMotion MLD) is activated in the boot‐
ing process (Boot 2.9). It first initializes itself and checks whether a correct
boot project is available. If yes, it is loaded. Depending on the configuration,
the drive-integrated PLC is set to RUN, remains in STOP or is only started in
phase 4 (operating mode) (parameterization via "P-0-1367, PLC
configuration").
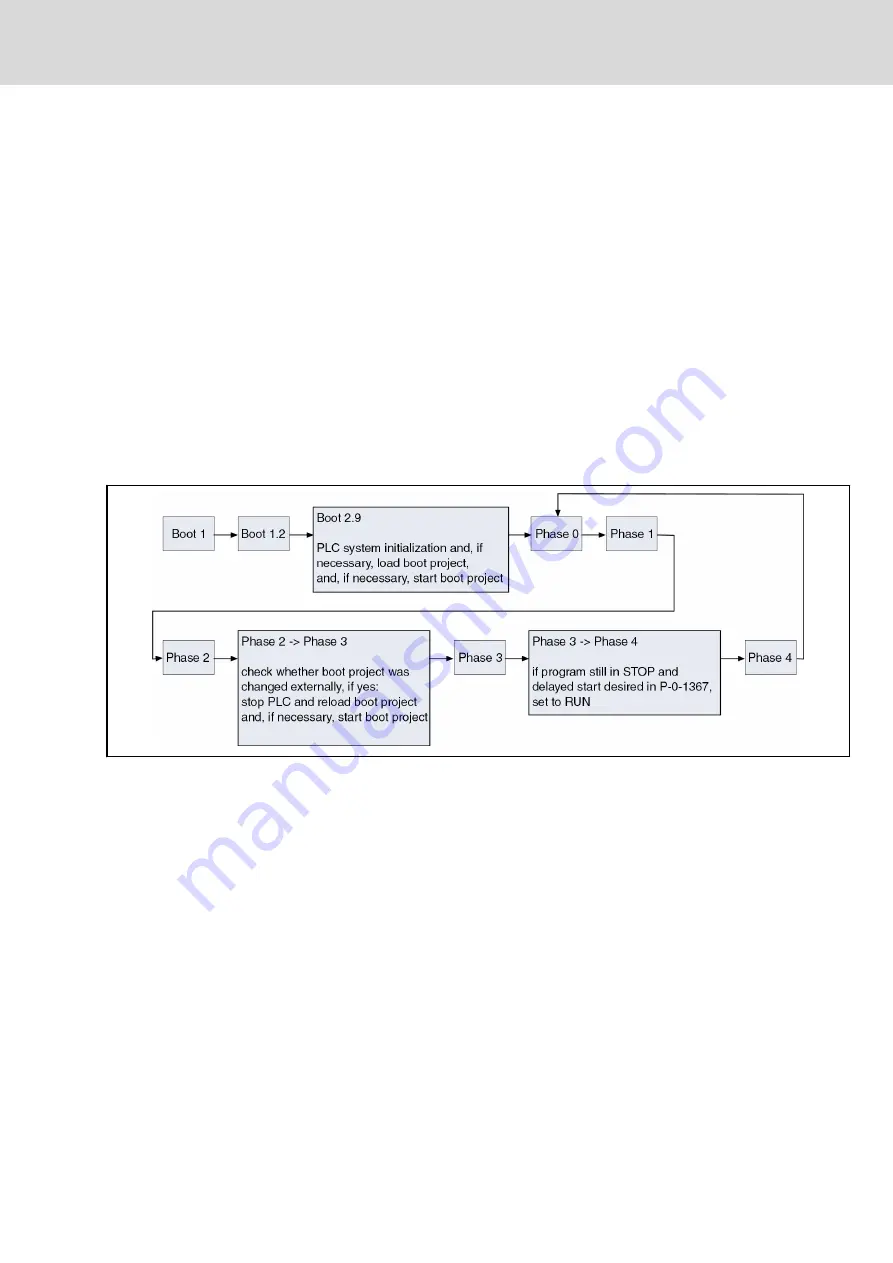
The figure below illustrates the booting process and the communication
phase sequence of Rexroth IndraMotion MLD:
Figure name DF000133
Fig. 8-3:
Rexroth IndraMotion MLD run-up
Pertinent parameters
The following parameters are used in this context:
●
P-0-1367, PLC configuration
●
S-0-0127, C0100 Communication phase 3 transition check
●
S-0-0128, C0200 Communication phase 4 transition check
Pertinent diagnostic messages
The following diagnostic messages are generated during the run-up phase:
●
C0100 Communication phase 3 transition check
●
C0200 Communication phase 4 transition check
If an error occurs during the transition checks, this is signaled with a diagnos‐
tic message of pattern C01xx or C02xx.
Boot-up
During boot-up
●
the PLC operating system is initialized (unless prevented before
Boot 2.9)
●
a boot project is loaded if necessary (if available)
●
the boot project is started if necessary (unless prevented via "P-0-1367,
PLC configuration")
DOK-INDRV*-MLD3-**VRS*-AP02-EN-P
Bosch Rexroth AG
219/267
Rexroth IndraDrive Rexroth IndraMotion MLD (2G) as of MPx-18
Programming information
LSA Control S.L. www.lsa-control.com [email protected] (+34) 960 62 43 01