www.balluff.com
7
italiano
3.1
Struttura
Collegamento elettrico:
il collegamento elettrico viene
eseguito fisso tramite un connettore a spina (vedere
Legenda codici di identificazione a pagina 18).
Corpo:
corpo in alluminio nel quale si trova la guida
d’onda ed i dispositivi elettronici di analisi.
Datore di posizione:
definisce la posizione da misurare
sulla guida d’onda. I datori di posizione sono disponibili in
varie tipologie costruttive e devono essere ordinati
separatamente (vedere Accessori a pagina 14).
Lunghezza nominale:
per adattare in maniera ottimale il
BTL all’applicazione sono disponibili le lunghezze nominali
da 50 mm a 7620 mm.
3.2
Funzionamento
Nel BTL si trova la guida d’onda, protetta da un corpo in
alluminio. Lungo la guida d’onda viene spostato un datore
di posizione. Questo datore di posizione è collegato al
componente dell’impianto del quale deve essere
determinata la posizione.
Il datore di posizione definisce la posizione da misurare
sulla guida d’onda.
Un impulso INIT, generato internamente, crea in unione
con il campo magnetico del datore di posizione un’onda
torsionale nella guida d’onda che si forma tramite
magnetostrizione e si propaga alla velocità ultrasonica.
La propagazione dell’onda torsionale verso l’estremità
finale della guida d’onda viene assorbita nella zona di
smorzamento. La propagazione dell’onda torsionale verso
l’estremità iniziale della guida d’onda genera un segnale
elettrico in una bobina di rilevamento. La posizione viene
determinata dalla durata di propagazione dell’onda.
Questa informazione viene trasmessa tramite l’interfaccia
EtherCAT
®
. EtherCAT
®
è un sistema bus industriale che si
basa sullo strato fisico di Ethernets (vedere www.ethercat.
org).
Il BTL7 è in grado di rilevare ed elaborare fino a 16 datori di
posizione. Il numero massimo di datori di posizione
dipende dalla lunghezza nominale. Per ogni datore di
posizione è possibile emettere la posizione e la velocità.
La configurazione è possibile tramite interfaccia CoE.
Sono altresì possibili le seguenti possibilità di
configurazione:
– Numero di datori di posizione. Numero fisso da 1 a 16
o flessibile (FMM). In FMM, il numero di magneti
corrisponde al numero di magneti rilevato, al
massimo 16
– Regolazione della risoluzione dell’uscita di posizione e
di velocità
– Impostazione degli interruttori a camma
– Definizione dei limiti del campo di lavoro
– Inversione della direzione di misura
– Configurazione dell’uscita dati di processo (mapping)
Il BTL può essere azionato a scelta in modo asincrono o
sincrono con l’aiuto dei Distributed Clocks.
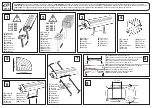
Fig. 3-1: BTL7..., struttura
3
Struttura e funzione
50
40.6
68
41
36.8
~80
11.5
~80
~250
~250
15
8
83
73
2xM12
11.5
M8
1) Campo non utilizzabile
2) Non compreso nella fornitura
3) La tacca sul lato superiore del profilo indica
l’inizio del campo di misura.
1)
Lunghezza nominale =
Campo di misura
Datore di posizione
BTL5-P-3800-2
1)
Staffe di fissaggio con boccole isolanti e viti a
testa cilindrica ISO 4762 M5x22, coppia di
serraggio max. 2 Nm
2)
2)
Punto zero
Tacca 3)
Punto finale
BTL7-V50E-M _ _ _ _ -P-C003
Sensore di posizionamento lineare magnetostrittivo – Forma profilo
Содержание BTL7-V50E-M-P-C003 Series
Страница 2: ...www balluff com...
Страница 3: ...BTL7 V50E M_ _ _ _ P C003 Betriebsanleitung deutsch...
Страница 4: ...www balluff com...
Страница 22: ......
Страница 23: ...BTL7 V50E M_ _ _ _ P C003 User s Guide english...
Страница 24: ...www balluff com...
Страница 42: ......
Страница 43: ...BTL7 V50E M_ _ _ _ P C003 Notice d utilisation fran ais...
Страница 44: ...www balluff com...
Страница 62: ......
Страница 63: ...BTL7 V50E M_ _ _ _ P C003 Manuale d uso italiano...
Страница 64: ...www balluff com...
Страница 82: ......
Страница 83: ...BTL7 V50E M_ _ _ _ P C003 Manual de instrucciones espa ol...
Страница 84: ...www balluff com...