8
deutsch
3
Aufbau und Funktion (Fortsetzung)
3.2
Funktion
Im BTL befindet sich der Wellenleiter, geschützt durch ein
Edelstahlrohr. Entlang des Wellenleiters wird ein Positions-
geber bewegt. Dieser Positionsgeber ist mit dem Anlagen-
bauteil verbunden, dessen Position bestimmt werden soll.
Der Positionsgeber definiert die zu messende Position auf
dem Wellenleiter.
Ein intern erzeugter INIT-Impuls löst in Verbindung mit dem
Magnetfeld des Positionsgebers eine Torsionswelle im Wel-
lenleiter aus, die durch Magnetostriktion entsteht und mit
Ultraschallgeschwindigkeit fortschreitet.
Die zum Ende des Wellenleiters laufende Torsionswelle
wird in der Dämpfungszone absorbiert. Die zum Anfang
des Wellenleiters laufende Torsionswelle erzeugt in einer
Abnehmerspule ein elektrisches Signal. Aus der Laufzeit
der Welle wird die Position bestimmt. Der Positionswert
entspricht der Laufzeit der Torsionswelle und wird als
digitale Zeitinformation zwischen den Start- und Stop-
Impulsen ausgegeben. Je nach Ausführung steht dieses
Ausgangssignal somit redundant an 2 oder 3 unabhängi-
gen Messeinheiten an.
Redundante magnetostriktive Positionsmesssysteme
enthalten – je nach Version – zwei oder drei unabhängige
Messeinheiten im selben Gehäuse, deren Kanäle intern
nicht synchronisiert sind. Wird nur ein Kanal verwendet
(der zweite oder dritte Kanal sind nur Ersatzkanäle) sind
hohe Präzision und hohe Auflösung leicht zu erreichen.
Werden zwei oder drei Kanäle gleichzeitig verwendet und
ist zudem eine hohe Ausgangsauflösung erforderlich,
müssen die Messungen auf jedem Kanal möglichst gleich-
zeitig stattfinden. Denn obwohl es in dem redundanten
System völlig unabhängige Messeinheiten mit unabhängi-
gen Wellenleitern gibt, kann ein Stromimpuls, der die
Messung auf einem Kanal auslöst, auch die Torsionswellen
der anderen Kanäle beeinflussen und so zu Positions-
sprüngen am Ausgang des Sensors führen. Die Beeinflus-
sung kann vermieden werden, wenn die Messung auf
jedem Kanal gleichzeitig gestartet wird indem die Init-Sig-
nale jeden Kanals miteinander synchronisiert werden.
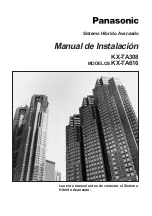
Die Auswertung kann auf die steigende oder fallende
Flanke bezogen werden. Dies geschieht mit hoher Präzi-
sion und Reproduzierbarkeit innerhalb des als Nennlänge
angegebenen Messbereichs.
Bild 3-2:
T
T
Start
Stop
Init
Zeit-/Wegmessprinzip
3.3
Anzahl Positionsgeber
Es können bis zu 16 Positionsgeber verwendet werden.
Der Mindestabstand (L) zwischen den Positionsgebern
muss 65 mm betragen.
Bild 3-3: Abstand zwischen den Positionsgebern
3.4
LED-Anzeige
Bild 3-4: Lage der
LED
LED-Anzeige BTL7
Die jeweilige LED zeigt den Betriebszustand der
entsprechenden Messeinheit an.
LED
Betriebszustand
Grün
Normalfunktion
Positionsgeber ist innerhalb der Grenzen.
Rot
Fehler
Kein Positionsgeber oder Positionsgeber
außerhalb der Grenzen.
Rot
blinkend
Init-Fehler
Fehlendes oder kein gültiges Init-Signal.
Tab. 3-1: LED-Anzeige
BTL7-P511-M _ _ _ _ -T _ 2/3-S32/KA _ _ /FA _ _
Magnetostriktives Positionsmesssystem – Bauform Stab
Содержание BTL7-P511-M Series
Страница 2: ...www balluff com...
Страница 4: ...www balluff com...
Страница 24: ......
Страница 26: ...www balluff com...
Страница 46: ......
Страница 48: ...www balluff com...
Страница 68: ......
Страница 70: ...www balluff com...
Страница 90: ......
Страница 92: ...www balluff com...