






















AC Parameters
B-10
Copyright © 2000 ARM Limited. All rights reserved.
ARM DDI 0186A
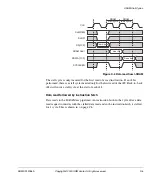
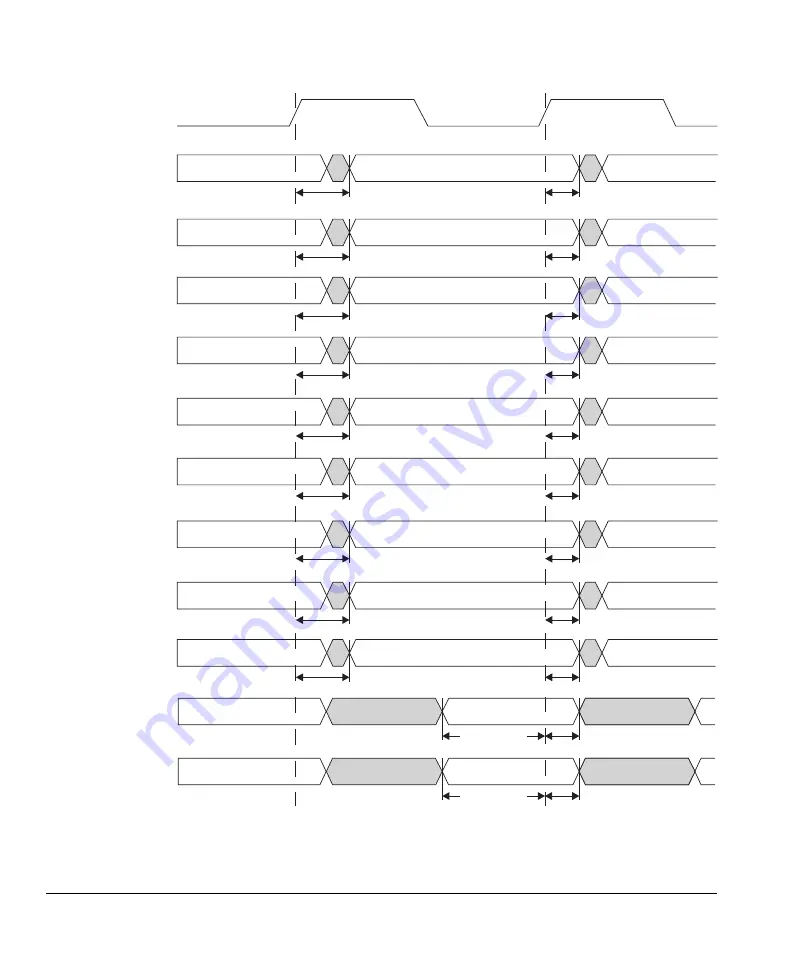
Figure B-10 ETM interface timing
CLK
ETMIA[31:1]
ETM31TO25[31:25]
ETM15TO11[15:11]
ETMInMREQ
ETMISEQ
ETMITBIT
ETMINSTREXEC
ETMINSTRVALID
ETMDA[31:0]
ETMRDATA[31:0]
ETMWDATA[31:0]
ETMMAS[31:0]
ETMnWAIT
ETMDMORE
ETMDnMREQ
ETMDnRW
ETMDABORT
ETMCHSD[1:0]
ETMPASS
ATMPLATECANCEL
ETMDBGACK
ATMRNGOUT[1:0]
ETMEN
FIFOFULL
ETMBIGEND
ETMHIVECS
ETMPROCID
ATMPRODCDWR
T
ovtminst
T
ohetminst
T
ovetmdata
T
ohetmdata
T
ovetmstat
T
ohetmstat
T
ovtmicti
T
ohetmiuctl
T
ovetmnwait
T
ohetmnwait
T
ovetmdctl
T
ohetmdctl
T
ovetmcfg
T
ohetmcfg
T
ovetmcpif
T
ohetmcpif
T
ovetmdbg
T
ohetmdbg
T
ihetmfifull
T
ihetmen
T
isetmen
T
isetmfifofull
Содержание ARM966E-S
Страница 6: ...Contents vi Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 20: ...Introduction 1 4 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 48: ...Tightly coupled SRAM 4 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 80: ...Bus Interface Unit 6 20 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 118: ...Debug Support 8 26 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 130: ...Test Support 10 8 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 142: ...Instruction cycle timings 11 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 158: ...Signal Descriptions A 16 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 176: ...AC Parameters B 18 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...