





























M
OTION
C
ONTROL
Networked Indexer/Driver User Manual
ADVANCED MICRO CONTROLS INC.
26
Basic Move Types (continued)
Relative Move (continued)
Relative Moves can be brought to a Controlled Stop by using the Hold Move Command from your host con-
troller. When the command is accepted, the axis will immediately decelerate at the programmed rate and stop.
When stopped successfully, the Networked Driver will set a
In_Hold_State
bit in the input data table. The
Relative Move can be restarted with the Resume Move command from the host controller or the move can be
aborted by starting another move. The Resume Move command allows you to change the move’s Pro-
grammed Speed, Acceleration Value and Type, and the Deceleration Value and Type. The Target Position
cannot be changed with the Resume Move Command.
Controlled Stop Conditions
The move completes without error.
You toggle the Hold_Move control bit in the Network Output Data. Note that your holding position will
most likely not be the final position you commanded. You can resume a held Relative Move by using
the Resume Move command. The use of the Hold_Move and Resume_Move bits is further explained in
the
Immediate Stop Conditions
The Immediate Stop bit makes a 0
1 transition in the Network Output Data.
An inactive-to-active transition on an input configured as an E-Stop Input.
A CW or CCW Limit Switch is reached. If the limit that is reached is the same as the direction of travel,
for example, hitting the CW limit while running a CW move, a
Reset Errors
command must be issued
before moves are allowed in that direction again. If the limit that is reached is opposite the direction of
travel, a
Reset Errors
command does not have to be issued.
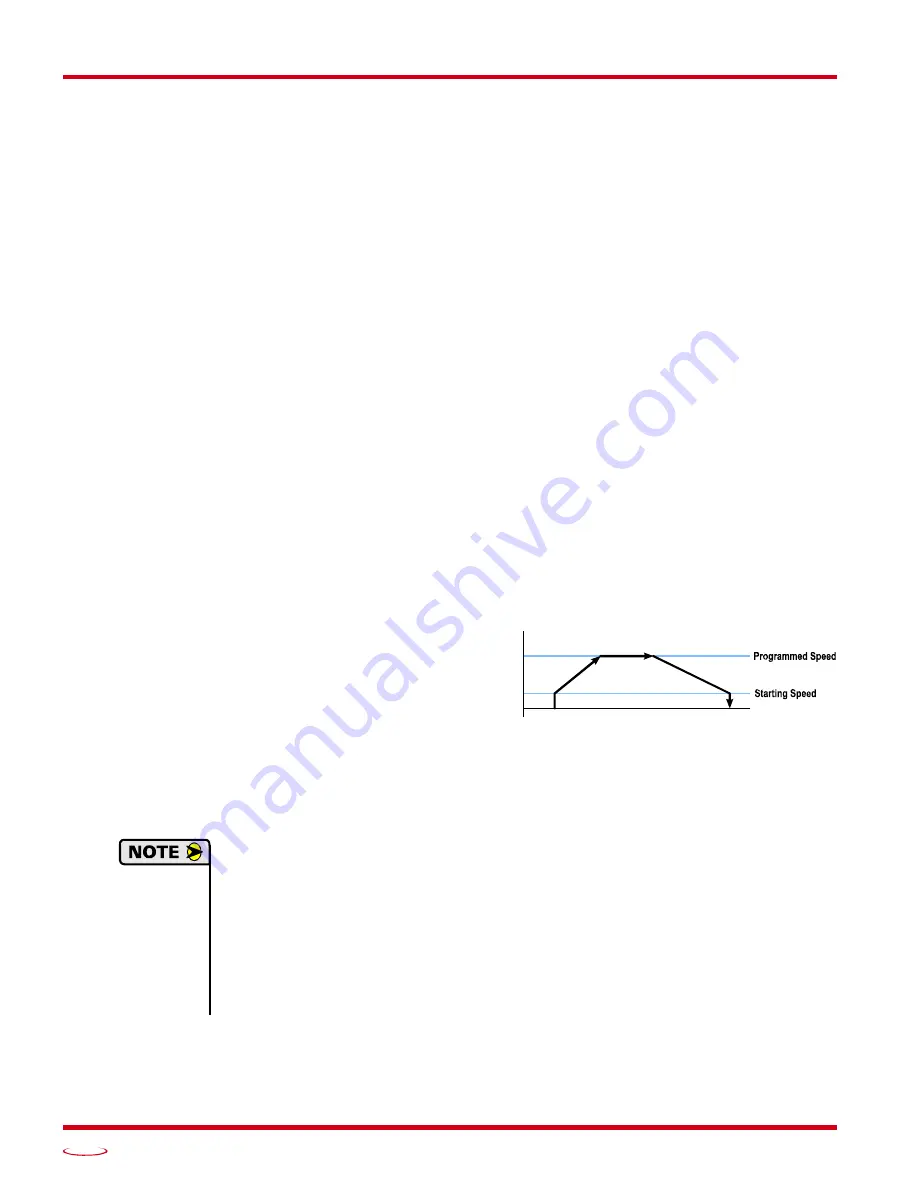
Absolute Move
Absolute Moves move from the Current Position (A)
to a given position (B). (The Networked Driver calcu-
lates the direction and number of steps needed to move
to the given position and moves that number of steps.)
A trapezoidal profile is shown to the right, but Abso-
lute Moves can also generate triangular profiles. The
command’s Target Position must be in the range of
±8,388,607 counts. The move will be clockwise if the
Target Position is greater than the Current Position and
counter-clockwise if the Target Position is less than
the Current Position.
1) The
Home Position
of the machine must be set before running an Absolute Move. See the
Homing an AMCI Networked Driver
, which starts on page 51, for infor-
mation on homing the machine.
2) The Motor Position must be valid before you can use an Absolute Move. The Motor Posi-
tion becomes valid when you preset the position or home the machine.
3) Absolute Moves allow you to move your machine without having to calculate relative posi-
tions. If you are controlling a rotary table, you can drive the table to any angle without hav-
ing to calculate the distance to travel. For example an Absolute Move to 180° will move the
table to the correct position regardless of where the move starts from.
Figure R3.7 Absolute Move
SP
E
E
D
POSITION
A
B
Содержание SD17060E-K
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S301...
Страница 20: ...UL CUL RECOGNIZED INSTALLATIONS Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 20 Notes...
Страница 40: ...MOTION CONTROL Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 40 Notes...
Страница 50: ...CALCULATING MOVE PROFILES Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 50 Notes...
Страница 56: ...HOMING AN AMCI NETWORKED DRIVER Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 56 Notes...
Страница 64: ...CONFIGURATION DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 64 Notes...
Страница 84: ...COMMAND MODE DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 84 Notes...
Страница 110: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...







































































