





























Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
377
Kinetix 5100 Safe Torque Off (STO) Feature
Chapter 13
Description of Operation
The Safe Torque Off (STO) feature provides a method, with sufficiently low
probability of failure, to force the power-transistor control signals to a disabled
state. When disabled, or any time power is removed from the safety enable inputs,
all of the drive output-power transistors are released from the ON-state. This
results in a condition where the drive performs a Category 0 Stop. Disabling the
power transistor output does not provide mechanical isolation of the electrical
output that is required for some applications.
For hardwired control of the safe torque-off function, the appropriate wiring
must be connected to the Safety connector plug. Refer to
for more information on the safety inputs.
Under normal operation, the safe torque-off inputs are energized. If an STO fault
is detected, then all of the output power transistors turn off. The safe torque-off
response time is less then 20 ms.
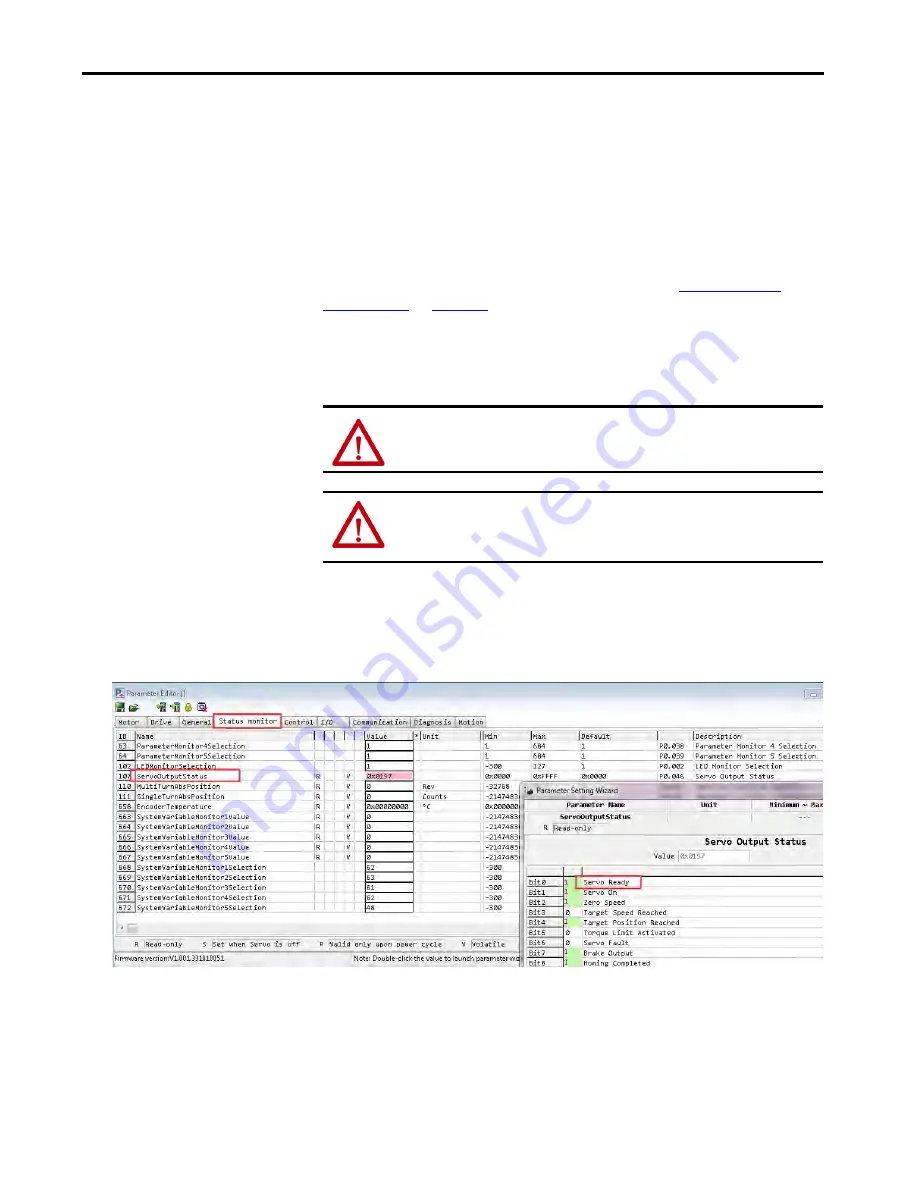
The ServoOutputStatus parameter represents various drive status values. Bit 0
(Servo Ready) is used to indicate the status of the Safe Torque Off inputs. This
bit can be monitored in KNX5100C software.
Figure 189 - ServoOutputStatus Parameter Setting
ATTENTION:
Permanent magnet motors can, in the event of two simultaneous
faults in the IGBT circuit, result in a rotation of up to 180 electrical degrees.
ATTENTION:
If either of the safety enable inputs are de-energized for more
than 1 second, or both inputs are in the OFF state simultaneously for more than
10 ms, a fault condition results.
Содержание Kinetix 5100 2198-E1004-ERS
Страница 114: ...114 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 6 Set Up EtherNet IP Communication Notes ...
Страница 402: ...402 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 14 Absolute Position Recovery Notes ...
Страница 484: ...484 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix C Use Add On Instructions Notes ...
Страница 488: ...488 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix D Full Closed Loop Control Notes ...
Страница 499: ......