





























Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
193
Input and Output Assembly
Appendix B
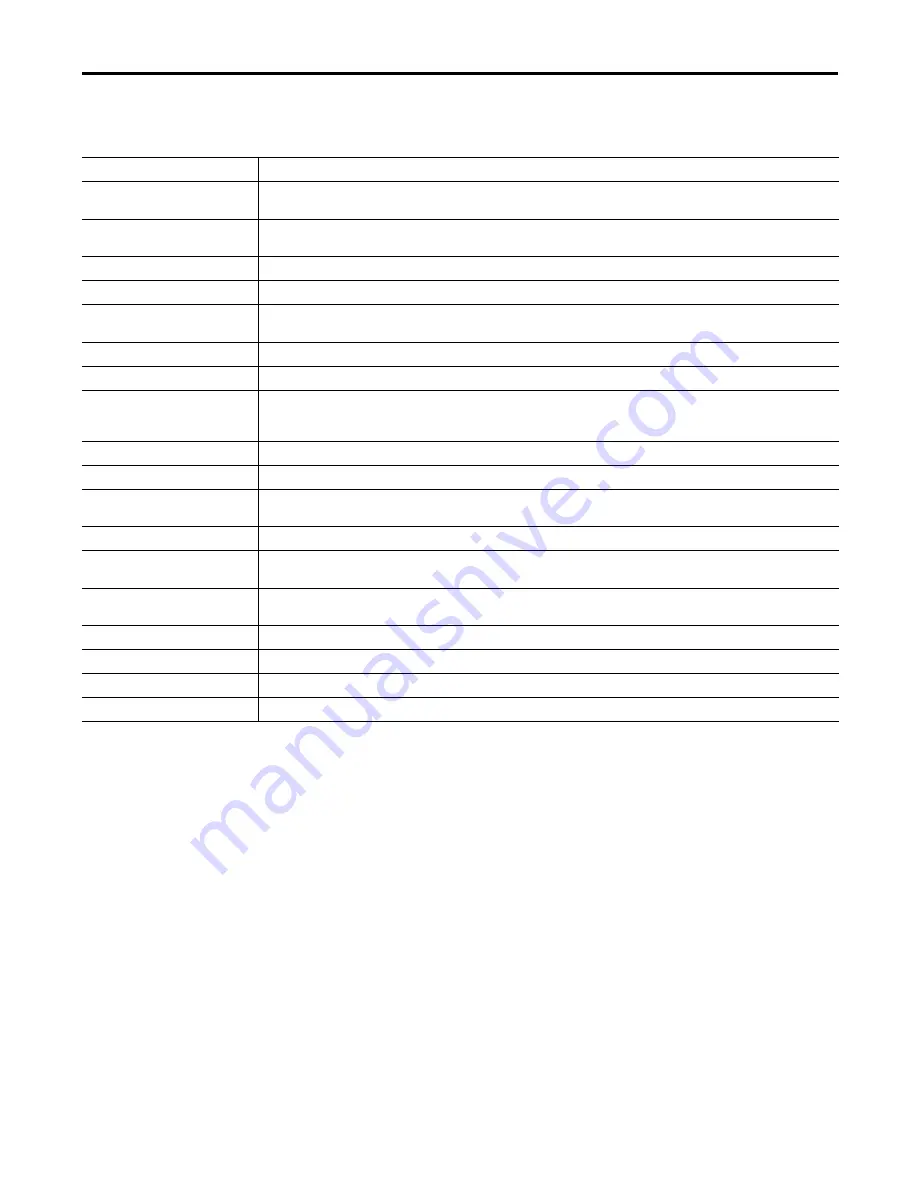
Table 73 - Output Assembly
RSLogix 5000 Tags
Description
AbortIndex
Upon transition from 0 to 1 of this field the drive aborts the current index or position based move the drive is executing and decel to zero
velocity.
StartMotion
Upon transition from 0 to 1 of this field the drive begins moving towards the position in the CommandPosition field below assuming the
drive is enabled.
DefineHome
Upon transition from 0 to 1 of this field the drive defines the current position of the motor to be home.
AbortHoming
Upon transition from 0 to 1 of this field the drive aborts (decel to zero velocity) the homing operation.
StartHoming
Upon transition from 0 to 1 of this field the drive begins homing as configured by the Homing section of the MotionView software
assuming the drive is enabled.
DriveEn
Upon transition from 0 to 1 of this field the drive enables, it turns on power structure, closes servo loops, tracks commands.
StartingIndex
This field defines the first index the drive should execute if the drive is operating in Indexing mode.
ReferenceSource
This field defines the type of control being exerted over EtherNet/IP network (0 = current, 1 = velocity, 2 = incremental position, 3 =
absolute position, 4 = incremental registration, 5 = absolute registration, 6=Rotary Absolute, 7=Rotary Incremental, 8=Rotary Shortest
Path, 9=Rotary Positive, 10=Rotary Negative).
AccelerationLimit
This field defines the maximum acceleration the drive uses in accelerating towards the commanded position.
DecelerationLimit
This field defines the maximum deceleration the drive uses in accelerating towards the commanded position.
CommandCurrentOrVelocity
This field defines the commanded current (Amps RMS) or Velocity (User Units/s) if the ReferenceSource is 0 or 1 respectively and the drive is
enabled.
VelocityLimit
This field defines the maximum velocity the drive uses in the profile towards the commanded position.
CommandPosition
This field defines the next position command the drive should move the motor towards, takes effect only upon 0 to 1 transition of
StartMotion field above.
RegistrationOffset
This field defines the offset from the registration event the drive should move to during an incremental or absolute registration based
move.
UserDefinedIntegerData0
The value in this field is written to whatever parameter it was configured to be in the MotionView software (Data Link).
UserDefinedIntegerData1
The value in this field is written to whatever parameter it was configured to be in the MotionView software (Data Link).
UserDefinedIntegerReal0
The value in this field is written to whatever parameter it was configured to be in the MotionView software (Data Link).
UserDefinedIntegerReal1
The value in this field is written to whatever parameter it was configured to be in the MotionView software (Data Link).
Содержание Kinetix 300
Страница 4: ...4 Rockwell Automation Publication 2097 UM001D EN P November 2012 Summary of Changes Notes...
Страница 18: ...18 Rockwell Automation Publication 2097 UM001D EN P November 2012 Chapter 1 Start Notes...
Страница 188: ...188 Rockwell Automation Publication 2097 UM001D EN P November 2012 Appendix A Interconnect Diagrams Notes...
Страница 216: ...216 Rockwell Automation Publication 2097 UM001D EN P November 2012 Appendix D MicroLogix Explicit Messaging Notes...
Страница 229: ...Kinetix 300 EtherNet IP Indexing Servo Drives User Manual...
Страница 230: ......