






















210
Introduction to the Autosampler
Transport Assembly
Transport Assembly
The transport unit comprises of an X-axis slide (left-right motion), a Z-axis
arm (up-down motion), and a gripper assembly (rotation and
vial-gripping).
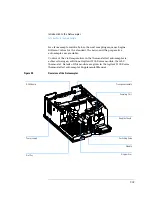
Figure 36
Transport Assembly
The transport assembly uses four stepper motors driven in closed-loop
mode for accurate positioning or the gripper assembly for sample-vial
transport. The rotational movement of the motors is converted to linear
motion (X- and Z-axes) by toothed belts connected to the drive spindles.
The rotation (theta axes) of the gripper assembly is transferred from the
motor by a toothed belt and series of gears. The opening and closing of the
gripper fingers are driven by a stepper motor linked by a toothed belt to
the planetary gearing inside the gripper assembly.
Gripper
Flex board
X axis
Z axis
Theta axis
Theta motor
X motor
Gripper motor
Z motor (not in
view)
Содержание G1313A
Страница 1: ...s1 Agilent 1100 Series Standard Micro and Preparative Autosamplers Reference Manual ...
Страница 3: ...Reference Manual Agilent 1100 Series Standard Micro and Preparative Autosamplers ...
Страница 12: ...12 Contents ...
Страница 39: ...2 2 Optimizing Performance How to optimize the autosamplers to achieve best results ...
Страница 49: ...3 3 Troubleshooting and Test Functions The modules built in troubleshooting and test functions ...
Страница 93: ...93 Troubleshooting and Test Functions Step Commands ...
Страница 159: ...5 5 Parts and Materials Detailed illustrations and lists for identification of parts and materials ...
Страница 160: ...160 Parts and Materials Main Assemblies Main Assemblies Figure 19 Autosampler Main Assemblies 5 3 4 2 1 9 8 7 6 ...
Страница 166: ...166 Parts and Materials Analytical Head Assembly Figure 21 Analytical Head Assembly 2 3 4 5 6 1 ...
Страница 191: ...191 Parts and Materials Remote Cables NOTE START and STOP are connected via diodes to pin 3 of the 3394 connector ...
Страница 216: ...216 Introduction to the Autosampler Electrical Connections ...
Страница 217: ...7 7 Theory of Operation Theory of operation of mechanical hardware electronics and instrument interfaces ...
Страница 244: ...244 Theory of Operation The Main Power Supply Assembly ...
Страница 265: ...265 Introduction to the Control Module Diagnostics and Tests ...
Страница 268: ...268 Introduction to the Control Module Diagnostics and Tests ...
Страница 269: ...9 9 Specifications Performance specifications of the Agilent 1100 Series Standard Micro and Preparative Autosamplers ...
Страница 274: ...274 Specifications Performance Specifications ...
Страница 275: ...10 Legal Safety and Warranty Information ...
Страница 286: ...286 Agilent Technologies on Internet ...
Страница 290: ...290 Index ...
Страница 291: ......