






















Using BenchCel Diagnostics
22
G5580A BenchCel Microplate Handler Quick Guide
2
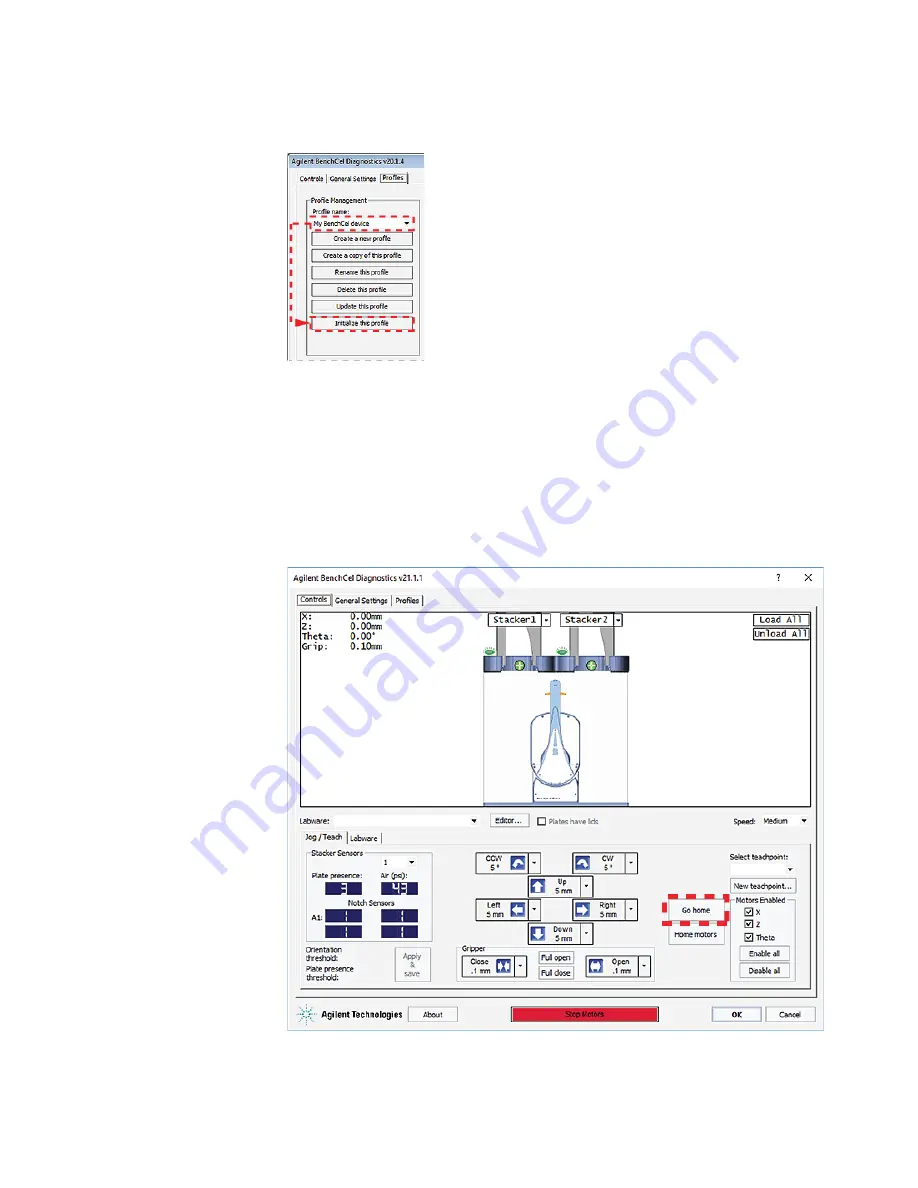
Click
Initialize this profile
to establish communication with the BenchCel Microplate
Handler and load the profile information.
Sending the robot to the home position
The home position is where the robot head is at the center of the BenchCel Microplate
Handler and the robot arms are perpendicular to the
x
-axis. You send the robot to the
home position if you want the robot out of the way in a safe position.
To send the robot to the home position:
1
In the
Controls
tab, click the
Jog/Teach
tab.
2
Click
Go Home
.