





























Spatial Reference Manual
Page 32 of 158
Version 4.4
04/06/2019
8.3
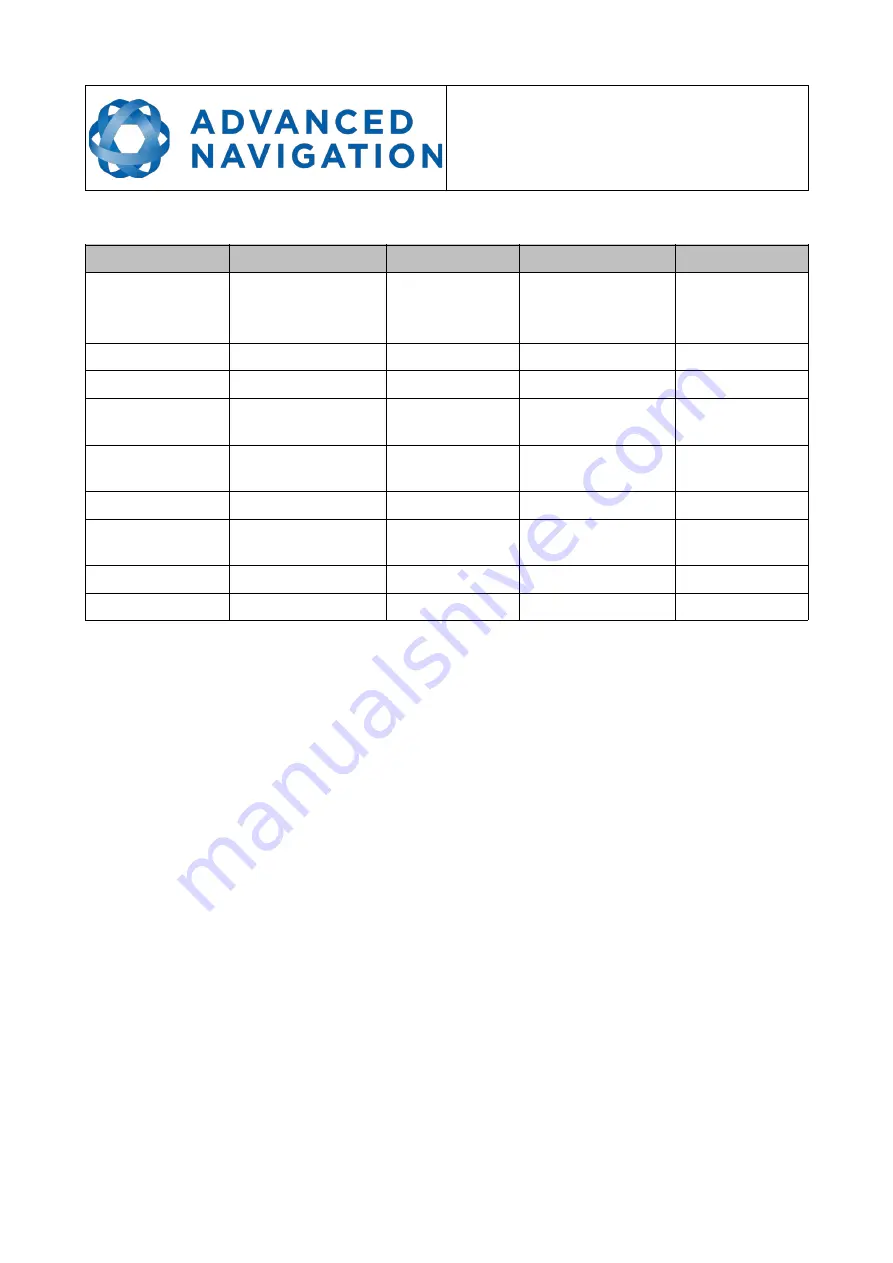
Sensor Specifications
Parameter
Accelerometers Gyroscopes Magnetometers
Pressure
Range
(dynamic)
±
2 g
±
4 g
±
16 g
±
250 °/s
±
500 °/s
±
2000 °/s
±
2 G
±
4 G
±
8 G
10 to 120 KPa
Bias Instability
20 ug
3 °/hr
-
10 Pa
Initial Bias
< 5 mg
< 0.2 °/s
-
< 100 Pa
Initial Scaling
Error
< 0.06 %
< 0.04 %
< 0.07 %
-
Scale Factor
Stability
< 0.06 %
< 0.05 %
< 0.09 %
-
Non-linearity
< 0.05 %
< 0.05 %
< 0.08 %
-
Cross-axis
Alignment Error
< 0.05 °
< 0.05 °
0.05 °
-
Noise Density
100 ug/√Hz
0.004 °/s/√Hz
210 uG/√Hz
0.56 Pa/√Hz
Bandwidth
400 Hz
400 Hz
110 Hz
50 Hz
Table 8: Sensor specifications





















































