





























Motus Reference Manual
Page 73 of 146
Version 1.1
29/11/2019
12.9.1
Magnetic Calibration
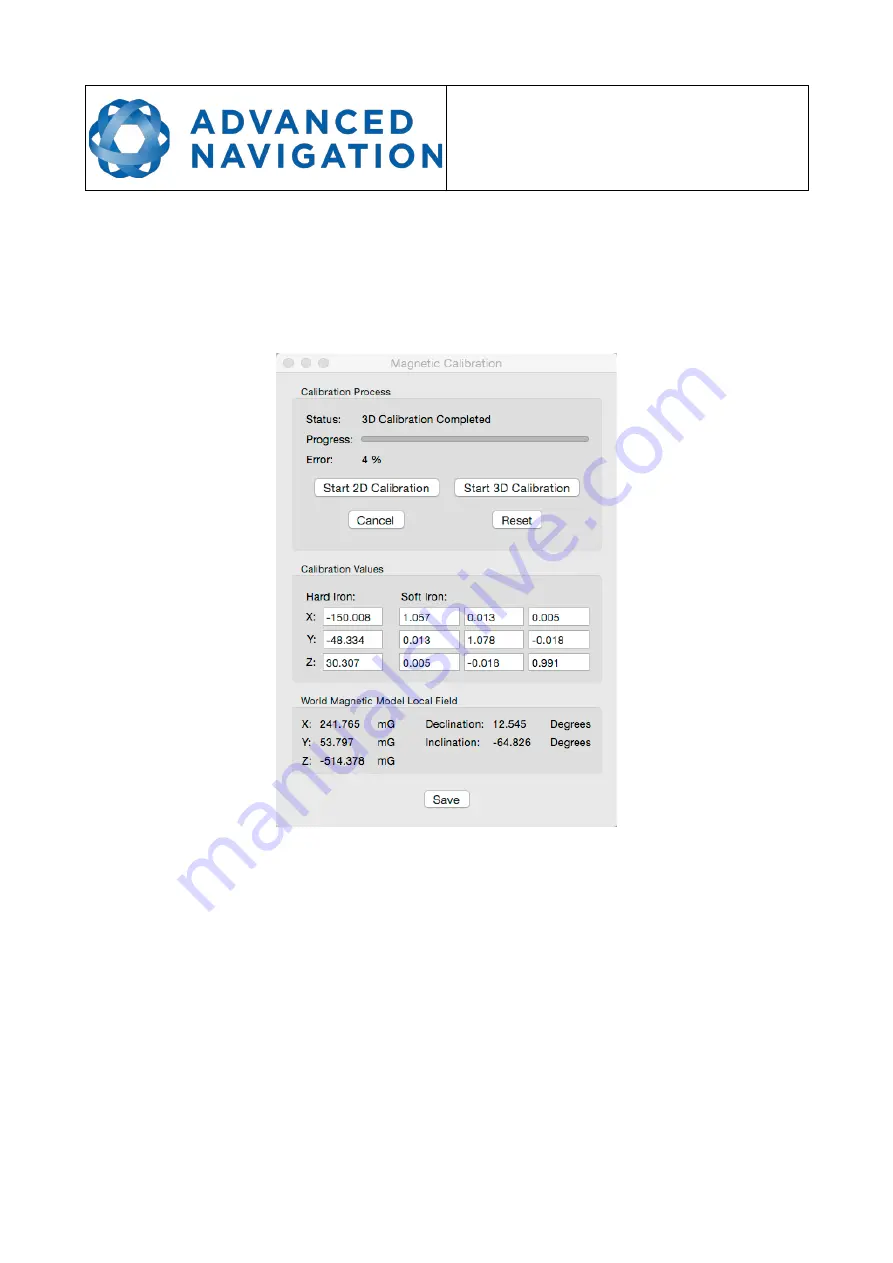
The Magnetic Calibration dialogue allows the user to perform magnetic calibration as
well as view and modify the magnetic calibration values. The actual magnetic
calibration is performed inside the Motus unit. This dialogue does not have any smarts,
it is just a control and display interface.
Illustration 51: Screenshot of Motus Manager
Magnetic Calibration dialogue
Содержание Motus
Страница 1: ...Motus Reference Manual ...
Страница 21: ...Motus Reference Manual Page 20 of 146 Version 1 1 29 11 2019 same folder as the Motus Manager software ...
Страница 38: ...Motus Reference Manual Page 37 of 146 Version 1 1 29 11 2019 ...
Страница 79: ...Motus Reference Manual Page 78 of 146 Version 1 1 29 11 2019 Illustration 58 Motus OEM connector pin numbering ...
Страница 90: ...Motus Reference Manual Page 89 of 146 Version 1 0 29 11 2019 ...
Страница 91: ...Motus Reference Manual Page 90 of 146 Version 1 0 29 11 2019 ...