





























30
16-Pins IO Line Definition
Driver-controller integration in addition to the digital input/output pin end defines
multiple input and output, the overloading jilt terminal also defines a certain number of input
and output, while the number of the input and output port enough, users do not need the back
of the port
:
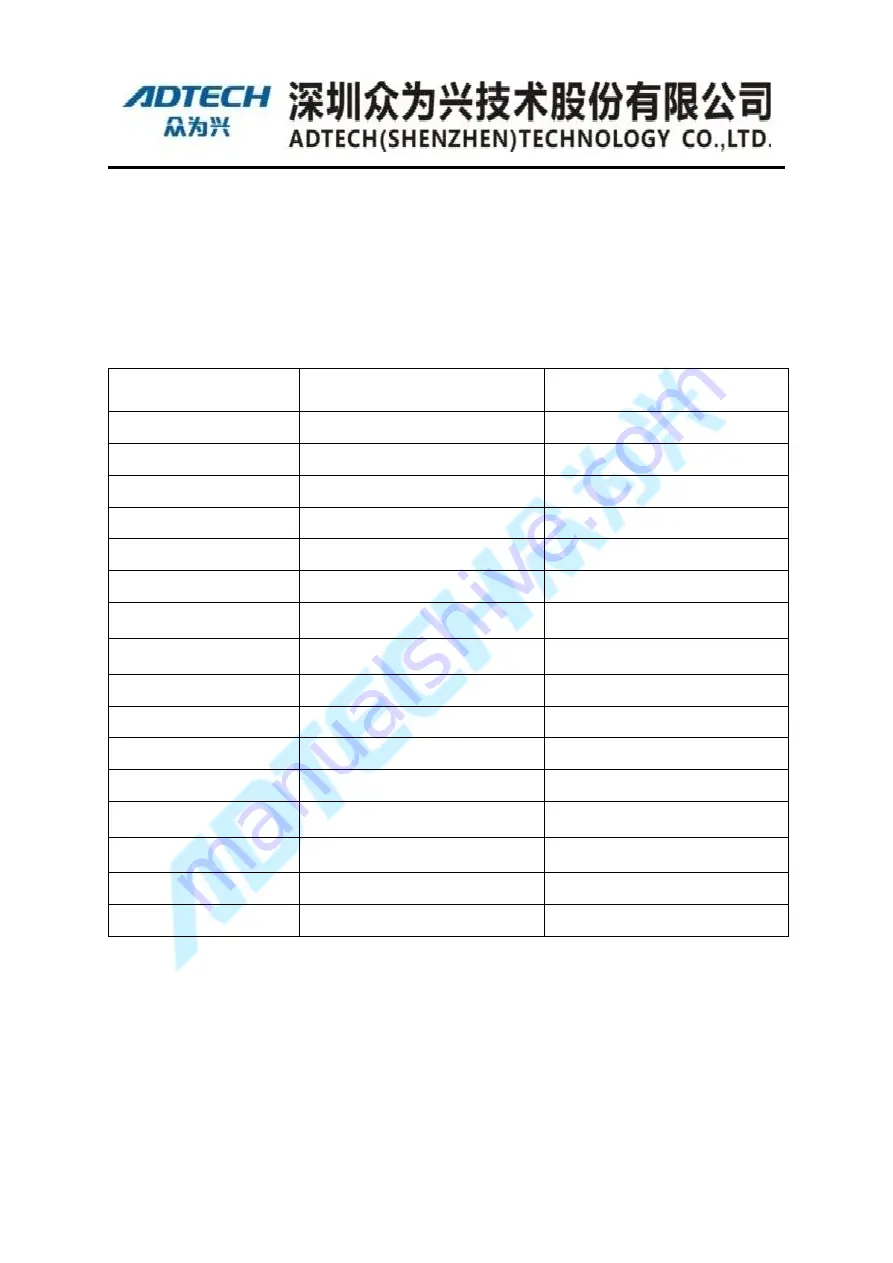
Chart 4-4 16-Pins twisted-pair definition
Definition
72Pin
Reloading the connector
terminal number
16cor
e shielded twisted-pair
(line)
IN28
25
Red gray
IN29
26
gray black
IN30
27
white red
IN31
28
White black
IN32
29
orange red
IN33
30
orange black
Relay1
(
Relay23
)
31
pink
Relay2
(
Relay24
)
32
Powder black
OUT19
33
yellow red
OUT20
34
yellow black
OUT21
35
Gray red red
OUT22
36
Gray black black
Relay3
(
Relay25
)
37
White red red
Relay4
(
Relay26
)
38
White black black
Interior24V Power
39
Orange red red
GND
40
Orange black black
16 core IO cable end four road relay output, in practical use, the robot motor is often
used with the brakes, the relay switch state to open or close the motor brake.
The brake specific instance "wiring" connection mode can be reference.
Содержание ADT-RC400
Страница 1: ...ADTECH Robotic Drive System ADT RC400 User Manual Electrical Wiring ...
Страница 11: ...X Power cord must be used with the specified wire Prone to fire and failure ...
Страница 20: ...19 Peripheral Devices SCARA Robot FlexPendant IO Board QC400 Controller Figure 2 1 System Configuration ...
Страница 45: ......







































































