





























16
Signal Connections
3.2 Encoder Feedback Signals EA, EB and EZ
The encoder feedback signals include EA, EB, and EZ. Every axis
has six pins for three differential pairs of phase-A (EA), phase-B
(EB), and index (EZ) inputs. EA and EB are used for position
counting, and EZ is used for zero position indexing.
The input circuit of the EA, EB, and EZ signals is shown as fol-
lows:
Figure 3-3: EA, EB, and EZ signals
Please note that the voltage across each differential pair of
encoder input signals (EA+, EA-), (EB+, EB-), and (EZ+, EZ-)
should be at least 3.5V. Therefore, the output current must be
observed when connecting to the encoder feedback or motor
driver feedback as not to over drive the source. The differential
signal pairs are converted to digital signals EA, EB, and EZ; then
feed to the PCL6045 ASIC (R=220ohm).
Below are examples of connecting the input signals with an exter-
nal circuit. The input circuit can be connected to an encoder or
motor driver if it is equipped with: (1) a differential line driver or (2)
an open collector output.
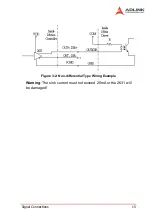
Connection to Line Driver Output
To drive the HSL-4XMO encoder input, the driver output must pro-
vide at least 3.5V across the differential pairs with at least 6mA
driving capacity. The grounds of both sides must be tied together.
The maximum frequency will be 4Mhz or more depends on wiring
distance and signal conditioning.
Содержание HSL-4XMO
Страница 4: ......
Страница 16: ...6 Introduction ...
Страница 36: ...26 Signal Connections ...
Страница 61: ...Operation Theory 51 Figure 4 18 home_mode 1 home_mode 3 ORG EZ Slow down Stop Figure 4 19 home_mode 3 ...
Страница 67: ...Operation Theory 57 Home Search Example Home mode 1 Figure 4 29 Home Search Example ...
Страница 108: ...98 Motion Creator in LinkMaster ...







































































