



















3
1.2.
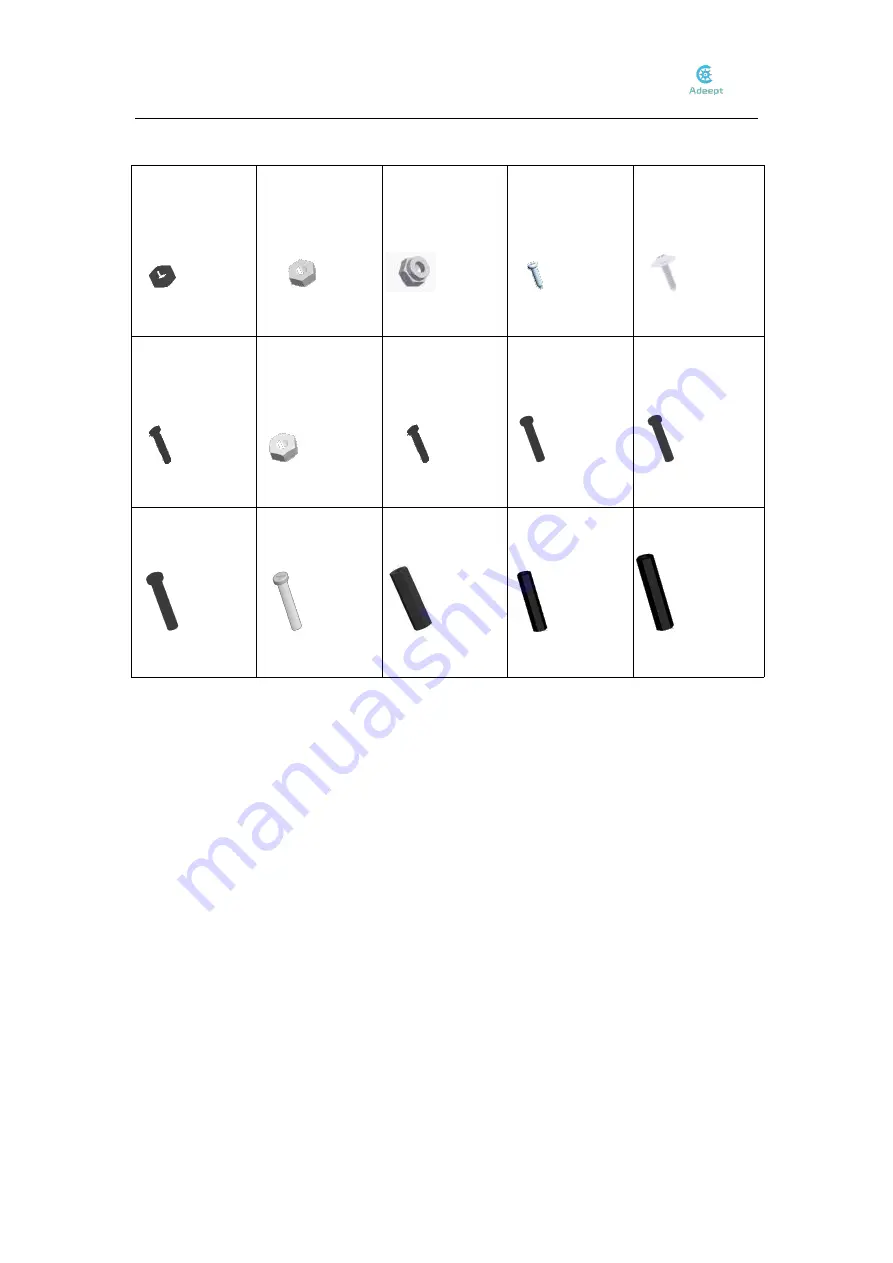
MachineryParts
M2
Nut
X26
M3
Nut
X30
M3
Lock
Nut
X1
M1.4*6
Self-tapping
Screw
X8
M1.7*6*6
Self-tapping
Screw
X13
M2*8
Screw
X26
M2.5
nut
X2
M2.5*8
Screw
X15
M3*8
Screw
X18
M3*10
Screw
X28
M3*16
Screw
X1
M3*12
Countersunk
Head
Screw
X2
M3*15
Nylon
Standoff
X1
M3*20
Nylon
Standoff
X2
M3*40
Nylon
Standoff
X6
Содержание Hexapod
Страница 1: ...1 1 www adeept com i...
Страница 10: ...www adeept com 8 3 Install remember your installation directory...
Страница 11: ...www adeept com 9...
Страница 13: ...www adeept com 11 3 Click to install...
Страница 21: ...www adeept com 19 4 Uploadprogram 3 3 After uploading turn off the power and switch to 1 and then turn it on...
Страница 29: ...www adeept com 27 Effect diagram after assembling Assemble the following components M2 nut X2 M2 8 screw X2...
Страница 35: ...www adeept com 33 Assemble the following components Effect diagram after assembling M3 8 screw X6...
Страница 36: ...www adeept com 34 Assemble the following components Effect diagram after assembling M2 8 screw X2 M2 nut X2...
Страница 41: ...www adeept com 39 Assemble the following components Effect diagram after assembling M3 10 screw X2 M3 nut X2...
Страница 46: ...www adeept com 44 Now you can connect arduino and robot body D2 D3 D8 D5 D11 D4 D10 D7 D13 D12 D6 D14 D9...
Страница 50: ...www adeept com 48 6 Wait to complete...
Страница 51: ...www adeept com 49 7 Open the software and you can control...
Страница 56: ...54 www adeept com 52...







































































