





























7 Reference information
7.7. Special tools
395
3HAC022033-001 Revision: E
©
Co
py
rig
h
t 200
4 - 20
08 ABB.
All r
ig
h
ts r
e
se
rv
ed
.
7.7. Special tools
General
All service instructions contain lists of tools required to perform the specified activity. The
required tools are a sum of standard tools, defined in section
and of special tools, listed directly in the instructions and also gathered in this section.
Basic tools
The table below specifies the tools in the basic toolkit (3HAC15571-3) that are used for the
current robot model. This toolkit is necessary primarly when removing and refitting the
motors.
The tools are also listed directly in the instructions.
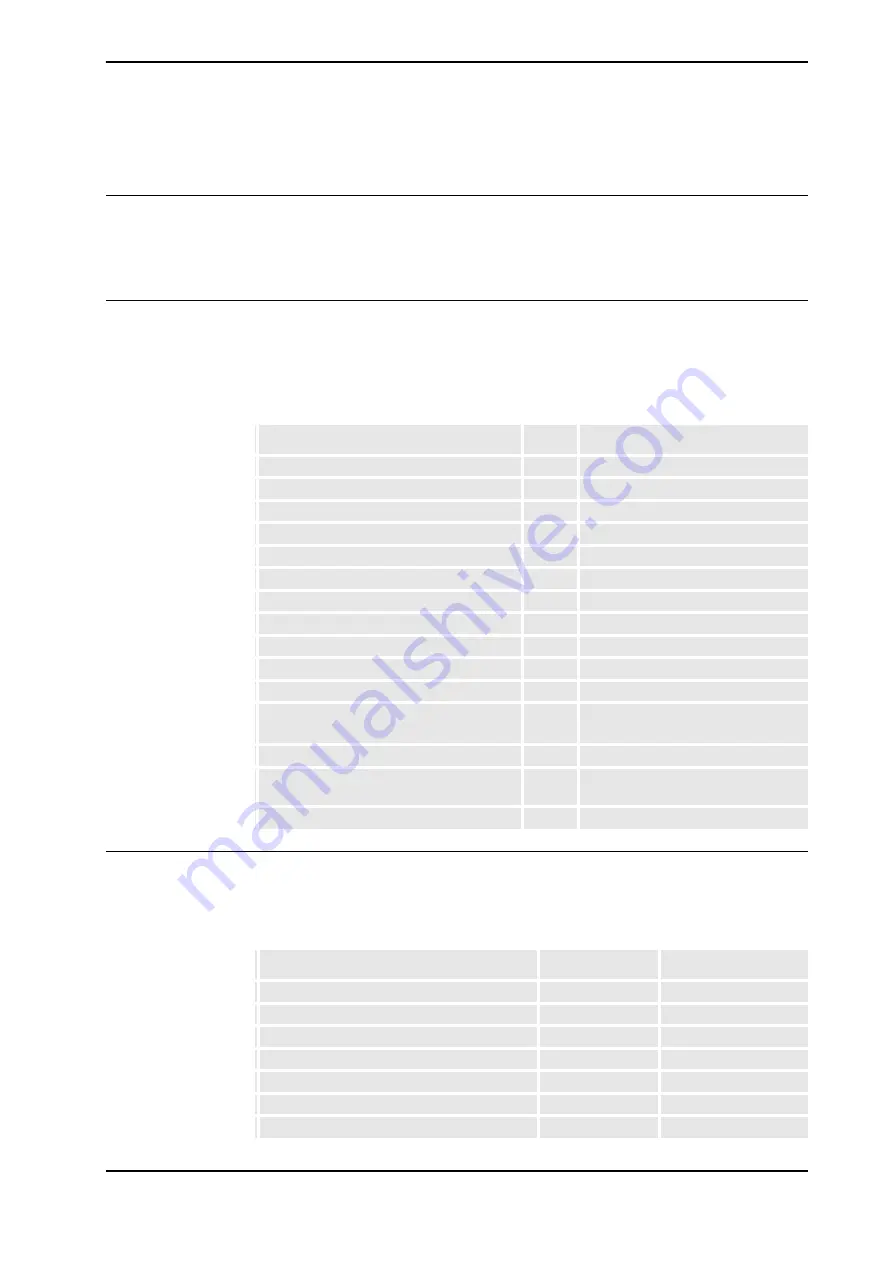
Special tools
The table below specifies the special tools required during several of the service procedures.
The tools may be ordered separately and are also specified directly in concerned instructions
in the
Product manual, procedures
.
Description
Qty
Art. no.
Bolts (M16 x 80) for Mech stop ax 3
2
3HAB3409-89
Extension 300mm for bits 1/2"
1
3HAC12342-1
Guide pins M8 x 100
2
3HAC15520-1
Guide pins M8 x 150
2
3HAC15520-2
Guide pins M10 x 100
2
3HAC15521-1
Guide pins M10 x 150
2
3HAC15521-2
Lifting tool, wrist unit
1
3HAC12734-1
Lifting tool, motor ax 1, 4, 5
1
3HAC14459-1
Lifting tool, motor ax 2, 3, 4
1
3HAC15534-1
Mech stop ax 3
2
3HAC12708-2
Removal tool, motor M10x
2
3HAC14972-1
Removal tool, motor M12x
1
3HAC14973-1
Fits motors, axes 1, 2, 3, 4 and 5.
Rotation tool
1
3HAC17105-1
Standard toolkit (content described in
section
1
3HAC15571-1
Washers for mech stop axis 3
2
3HAA1001-186
Description
Qty
Art. no.
Fixture lower arm
1
3HAC13660-1
Guide pins M12 x 130
2
3HAC022637-001
Guide pins M16 x 150
2
3HAC13120-2
Guide pins M16 x 200
2
3HAC13120-3
Guide pins M16 x 250
1
3HAC13120-4
Guide pins M16 x 300
2
3HAC13120-5
Guide pins, sealing ax 2/3, 100mm
1
3HAC14627-3
Continues on next page
Содержание IRB 7600 - 150/3.5
Страница 2: ......
Страница 461: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Contents 101 ...
Страница 463: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Legend 103 ...
Страница 464: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Brake Release Unit 104 ...
Страница 466: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 1 106 ...
Страница 467: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 2 107 ...
Страница 468: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 3 108 ...
Страница 469: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 4 109 ...
Страница 470: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 5 IRB 7600 110 ...
Страница 471: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 6 111 ...
Страница 472: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches axis 1 113 ...
Страница 473: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches Fan axis 2 114 ...
Страница 474: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches Fan axis 3 115 ...
Страница 475: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 5 IRB 6600 901 ...
Страница 476: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Design changes note 1 1 905 ...
Страница 481: ......





















































