
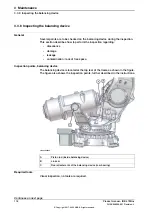




























3.3.11 Inspecting the transportation lock screw
Location of the transportation lock screw
xx1600002008
Lift, transport and rotation of the robot
The robot arm system must always be locked in a secure position during lift,
transport or rotation to inverted or standing position. This is done by locking the
lower arm in position with a transportation lock screw. The transportation lock
screw is stored at a parking position in the robot frame, when not used. This section
describes how to move the screw to the locking position in order to secure the
lower arm.
At delivery, the robot and the lower arm is already locked in the correct position
with the transportation lock screw.
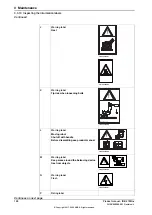
CAUTION
No tool is permitted to be fitted on the robot when it is lifted, transported or
rotated.
Required tools
Note
Article number
Equipment, etc.
Content is defined in section
.
-
Standard toolkit
Continues on next page
Product manual - IRB 6700Inv
131
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
3 Maintenance
3.3.11 Inspecting the transportation lock screw
Содержание IRB 6700Inv
Страница 1: ...ROBOTICS Product manual IRB 6700Inv ...
Страница 2: ...Trace back information Workspace 20D version a8 Checked in 2020 12 11 Skribenta version 5 3 075 ...
Страница 16: ...This page is intentionally left blank ...
Страница 40: ...This page is intentionally left blank ...
Страница 182: ...This page is intentionally left blank ...
Страница 672: ...This page is intentionally left blank ...
Страница 704: ...This page is intentionally left blank ...
Страница 720: ...This page is intentionally left blank ...
Страница 722: ...This page is intentionally left blank ...
Страница 729: ......