


























2 Installation and commissioning
2.3.4. Fitting equipment on robot
3HAC022032-001 Revision: E
60
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
2.3.4. Fitting equipment on robot
General
The robot features mounting holes for additional equipment.
Access to any of the following mounting holes may be obstructed by any additional cabling,
equipment etc. fitted by the robot user. Make sure the required mounting holes are accessible
when planning the robot cell.
Never drill a hole in the robot without first consulting ABB!
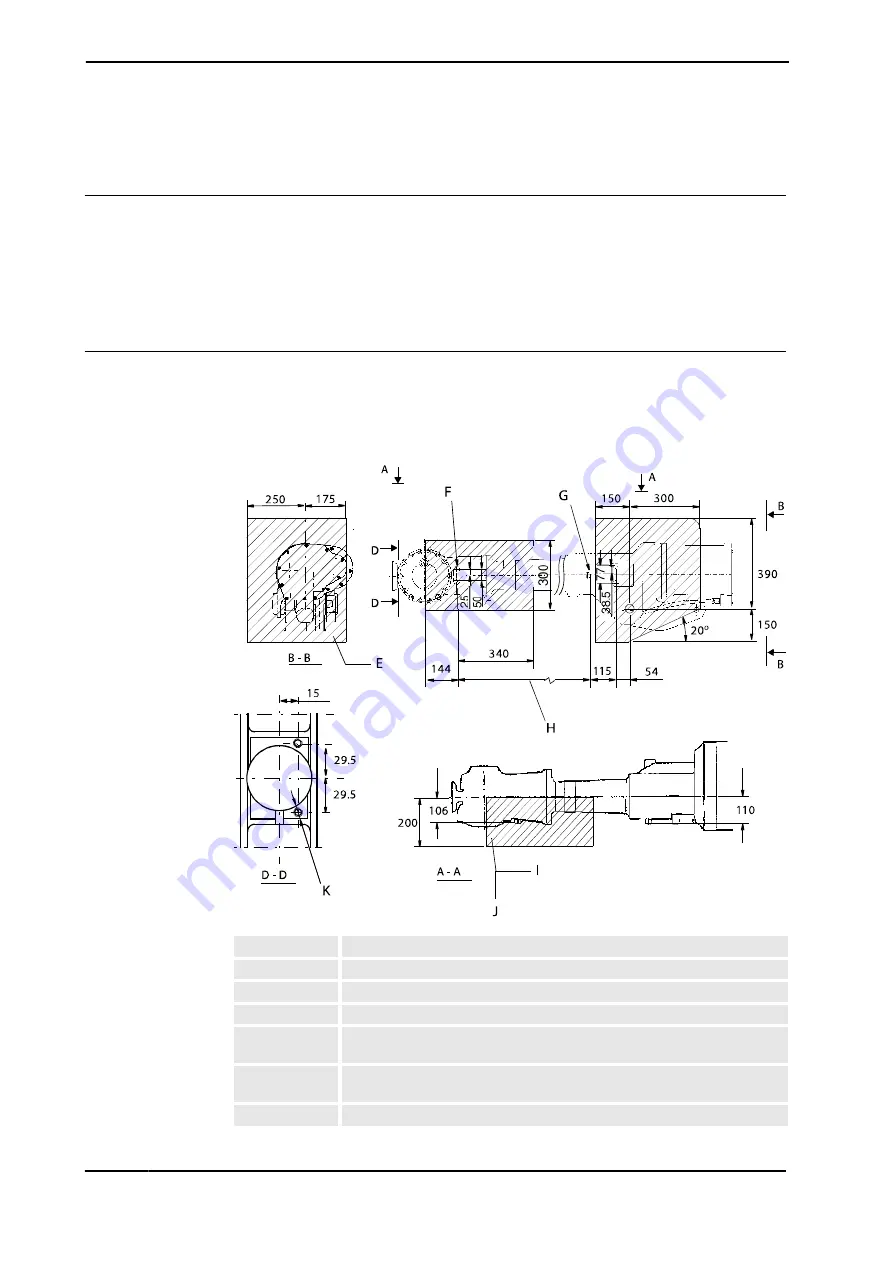
Fitting equipment on upper arm, IRB 4400/45, /60, /L30, /S and IRB 4450S
The illustration below shows the mounting holes available for fitting extra equipment on the
upper arm for robot versions IRB 4400/45, /60, /L30, /S and IRB 4450S.
The shaded area indicates the permitted positions (center of gravity) for any extra equipment
mounted in the holes.
xx0300000264
E
Max. 15 kg
F
M8 (2x), holes used if option 043 is chosen. Depth of thread: 9 mm
G
M8 (3x) Depth of thread: 14 mm
H
571 mm for IRB 4400/45 and /60. 1071 mm for IRB 4400/S and /L30
I
Max. 5 kg for IRB 4400/45 and /60 at max. handling weight and max. 5 kg
for IRB 4400/L30 and IRB 4450S at 25 kg handling weight
J
5 kg for IRB 4400/S and /L30 if the handling weight is max. 25 kg. If the
handling weight is 30 kg: 0 kg allowed!
K
M6 (2x), tapped depth 12 mm
Continues on next page
Содержание IRB 4400 - 45
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 236: ...4 Repair 4 9 2 Repair routines 3HAC022032 001 Revision E 234 Copyright 2004 2008 ABB All rights reserved ...
Страница 256: ...Product documentation M2004 3HAC022032 001 Revision E 254 Copyright 2004 2008 ABB All rights reserved ...
Страница 294: ...7 Part list 7 5 Position switch axis 1 3HAC022032 001 Revision E 292 Copyright 2004 2008 ABB All rights reserved ...
Страница 296: ......
Страница 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Страница 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Страница 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Страница 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Страница 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Страница 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Страница 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Страница 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Страница 306: ... Copyright 2004 2006 ABB All rights reserved 4 3 9 R1 SMB R2 SMB R1 G 8 5 7 3hab 3365 1 x Seriemätenhet Foldout 7 ...
Страница 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Страница 309: ...9 Circuit diagram 8 1 Introduction 3HAC022032 001 Revision E 296 Copyright 2004 2008 ABB All rights reserved ...
Страница 311: ... Copyright 2004 2006 ABB All rights reserved List of Contents Location of Connection Point Sheet 101 ...
Страница 312: ... Copyright 2004 2006 ABB All rights reserved Brake Release Unit Serial Measurement Board Sheet 102 ...
Страница 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Страница 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Страница 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Страница 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Страница 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Страница 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Страница 321: ......
Страница 322: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC 022032 001 Revision E en ...