





























3.4.3 Changing the oil, axis-1 gearbox on suspended robots
Validity of this section
This section is only valid for IRB 2600-20/1.65, IRB 2600-12/1.65, IRB 2600-12/1.85,
IRB 2600ID-15/1.85, IRB 2600ID-8/2.0.
General
This section describes how to change the axis-1 gearbox oil in a suspended robot.
Location of oil plugs
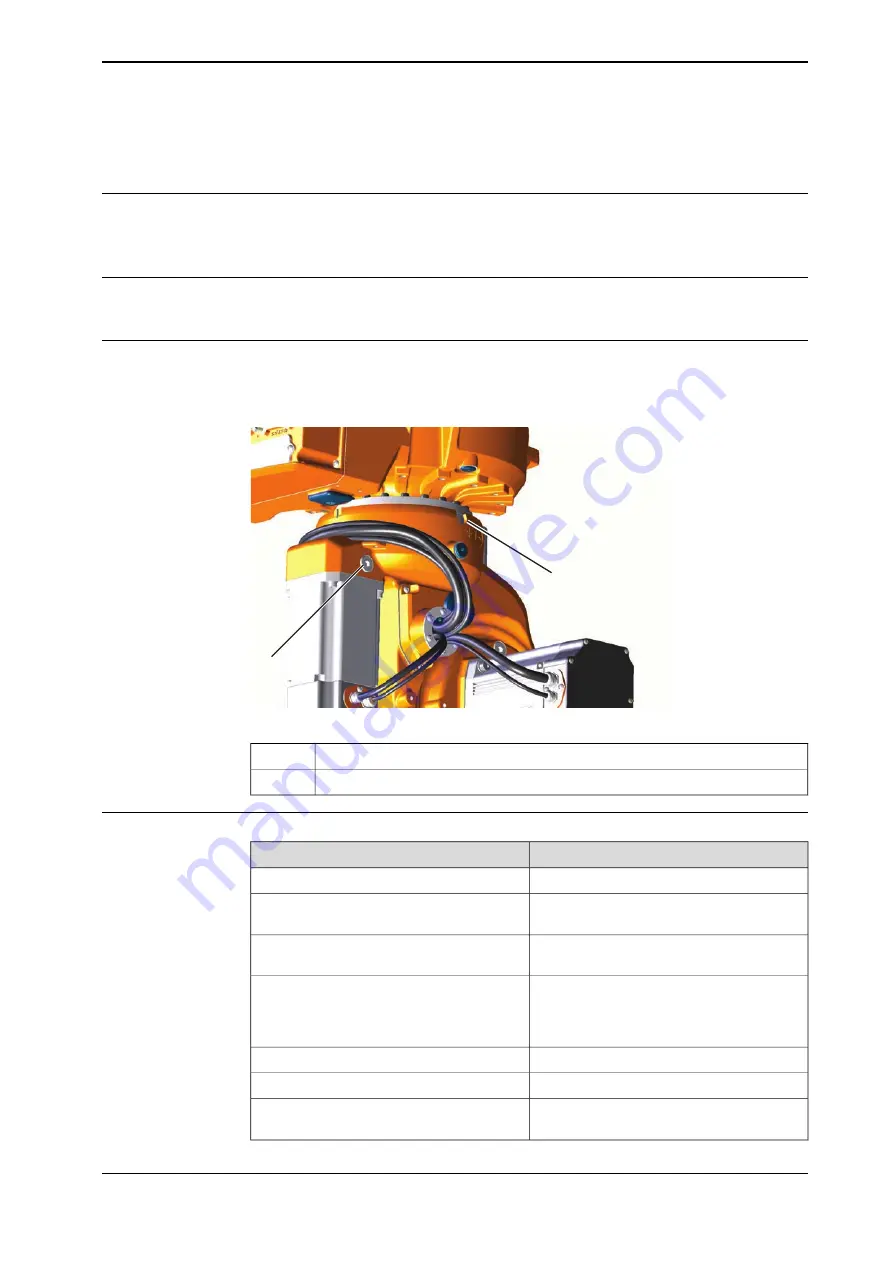
The oil plugs in axis 1 gearbox are located according to the following figures
IRB 2600-20/1.65, IRB 2600-12/1.65, IRB 2600-12/1.85, IRB 2600ID-15/1.85, IRB 2600ID-8/2.0
A
B
xx1200000883
Oil plug, venting
A
Oil plug, draining and filling
B
Required equipment
Note
Equipment
3HAC029646-001
Oil plug sealing washer, gearbox
See section
Type of lubrication in gearboxes
Lubricating oil
The capacity of the vessel must be sufficient
to take the complete amount of oil.
Oil collecting vessel
One example of oil dispenser can be found
in section:
•
Type of lubrication in gearboxes on
page 151
Oil dispenser
Oil change equipment
Used with the oil dispenser
Hose
Content is defined in section
.
Standard toolkit
Continues on next page
Product manual - IRB 2600
161
3HAC035504-001 Revision: AD
© Copyright 2009-2023 ABB. All rights reserved.
3 Maintenance
3.4.3 Changing the oil, axis-1 gearbox on suspended robots
Содержание IRB 2600ID
Страница 1: ...ROBOTICS Product manual IRB 2600 ...
Страница 2: ...Trace back information Workspace 23B version a11 Checked in 2023 06 20 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 114: ...This page is intentionally left blank ...
Страница 444: ...This page is intentionally left blank ...
Страница 456: ...This page is intentionally left blank ...
Страница 458: ...This page is intentionally left blank ...
Страница 464: ......
Страница 465: ......



































































