





























Drive control and features
46
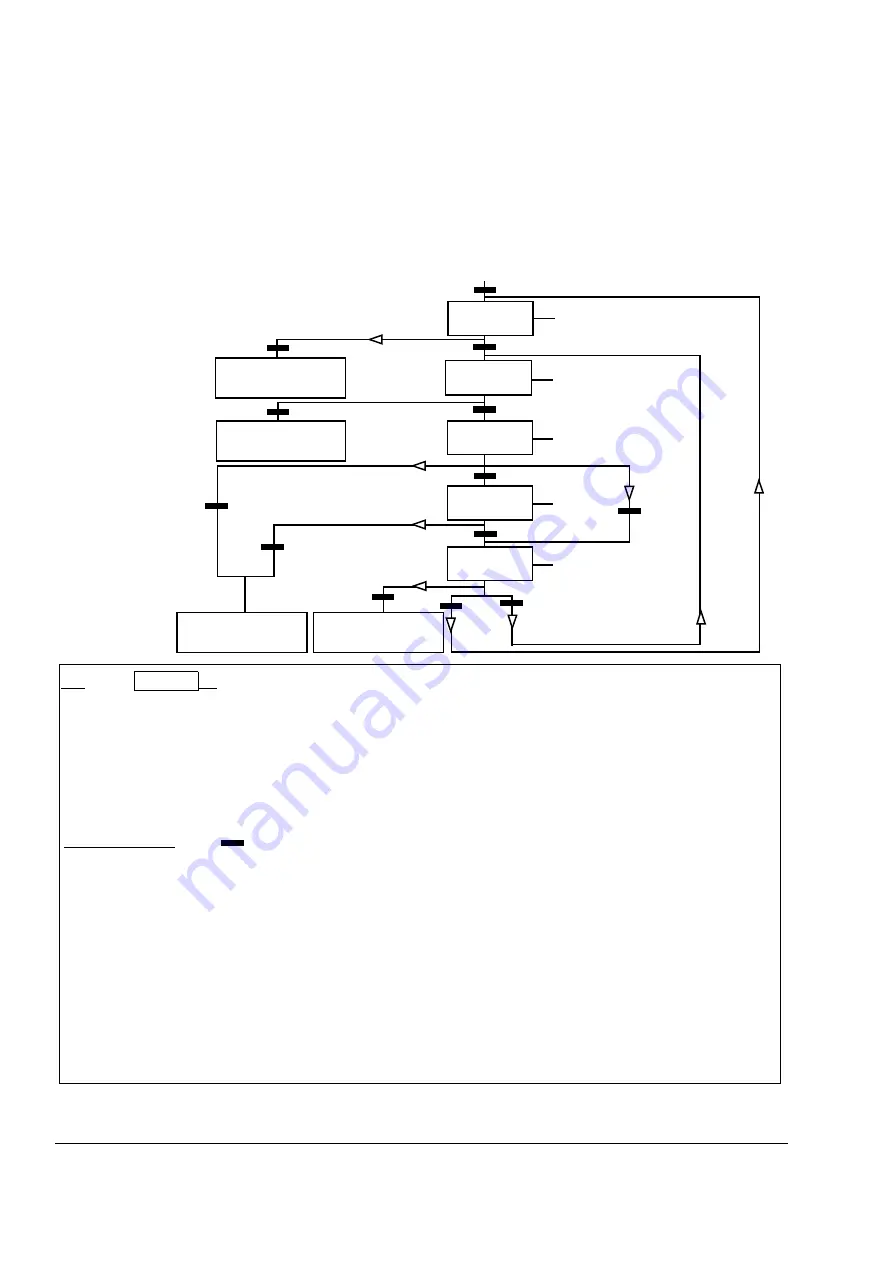
Mechanical brake
The program supports the use of a mechanical brake to hold the motor and load at
zero speed when the drive is stopped or not powered. The brake control is
configured by the parameters in
(page
Brake state diagram
CLOSE
BRAKE
From any state
0/1/1/0
1/1/1/1
1)
2)
3)
6)
7)
11)
12)
13)
5)
0/0/1/1
8)
State (Symbol
)
- NN: State name
- W/X/Y/Z: State outputs/operations
W: 1 = Brake open command is active. 0 = Brake close command is active. (Controlled through selected digital/relay output with signal
X: 1 = Forced start (inverter is modulating). The function keeps the internal Start on until the brake is closed in spite of the status of the external Stop.
Effective only when ramp stop has been selected as the stop mode (
). Run enable and faults override the forced start. 0 = No
forced start (normal operation).
Y:
1 = Drive control mode is forced to speed/scalar.
Z:
1 = Ramp generator output is forced to zero. 0 = Ramp generator output is enabled (normal operation).
NN
W/X/Y/Z
State change conditions (Symbol
)
1)
Brake control is active (
) OR modulation of the drive is requested to stop. The drive
control mode is forced to speed/scalar.
2)
External start command is on AND brake open request is on (
= 0).
3)
Starting torque required at brake release is reached (
) AND brake hold is not active (
Note:
With scalar control, the defined starting torque has no effect.
4)
Brake is open (acknowledgement = 1, selected by par.
) AND the brake open delay has passed (
). Start = 1.
5) 6) Start = 0 OR brake close command is active AND actual motor speed < brake close speed (
).
7)
Brake is closed (acknowledgement = 0) AND brake close delay has passed (
). Start = 0.
8)
Start = 1.
9)
Brake is open (acknowledgement = 1) AND brake close delay has passed.
10)
Defined starting torque at brake release is not reached.
11)
Brake is closed (acknowledgement = 0) AND brake open delay has passed.
12)
Brake is closed (acknowledgement = 0).
13)
Brake is open (acknowledgement = 1) AND brake close delay has passed.
0/1/1/1
Fault/Alarm*
BRAKE NOT CLOSED
9)
Fault/Alarm*
BRAKE START TORQUE
10)
4)
BSM = Brake State
Machine
* Depends on setting of
par.
BSM STOPPED
BSM
START
1/1/0/0
RELEASE
RAMP
OPEN
BRAKE
Fault/Alarm*
BRAKE NOT CLOSED
Fault/Alarm*
BRAKE NOT OPEN
Содержание ACSM1 Series
Страница 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Страница 2: ......
Страница 4: ......
Страница 12: ...Table of contents 12...
Страница 49: ...Drive control and features 49...
Страница 282: ...Standard function blocks 282...
Страница 306: ...Application program template 306...
Страница 312: ...Control chain block diagrams 312...
Страница 331: ...331...
Страница 332: ...332...
Страница 333: ......







































































