




























Appendix B – Drive-to-drive link
319
Appendix B – Drive-to-drive link
What this chapter contains
This chapter describes the wiring of, and available communication methods on the
drive-to-drive link. Examples of using standard firmware blocks in the
communication are also given starting on page
General
The drive-to-drive link is a daisy-chained RS-485 transmission line, constructed by
connecting the X5 terminal blocks of the JCU Control Units of several drives. It is
also possible to use an FMBA Modbus extension module installed into an option slot
on the JCU. The firmware supports up to 63 nodes on the link.
The link has one master drive; the rest of the drives are followers. By default, the
master broadcasts control commands as well as speed and torque references for all
followers. The master can send 8 messages per millisecond at 100/150-
microsecond intervals. Sending one message takes approximately 15
microseconds, which results in a theoretical link capacity of roughly 6 messages per
100 microseconds.
Multicasting the control data and reference 1 to a pre-defined group of drives is
possible, as is chained multicast messaging. Reference 2 is always broadcast by the
master to all followers. See parameters
…
.
Wiring
Shielded twisted-pair cable (~100 ohm, e.g. PROFIBUS-compatible cable) must be
used for the wiring. The maximum length of the link is 50 metres (164 ft).
The JCU Control Unit has a jumper (J3, “T”) next to the X5 terminal block for bus
termination. Termination must be ON on the drives at the ends of the drive-to-drive
link; on intermediate drives, termination must be OFF.
Instead of the X5 connector, an FMBA Modbus extension module can be used.
For best immunity, high quality cable is recommended. The cable should be kept as
short as possible. Unnecessary loops and running the cable near power cables
(such as motor cables) must be avoided.
Note:
The cable shields are to be grounded to the control cable clamp plate on the
drive. Follow the instructions given in the
Hardware Manual
of the drive.
Содержание ACSM1 Series
Страница 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Страница 2: ......
Страница 4: ......
Страница 12: ...Table of contents 12...
Страница 49: ...Drive control and features 49...
Страница 282: ...Standard function blocks 282...
Страница 306: ...Application program template 306...
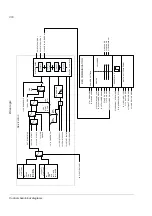
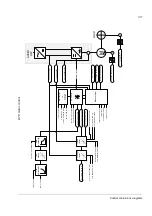
Страница 312: ...Control chain block diagrams 312...
Страница 331: ...331...
Страница 332: ...332...
Страница 333: ......







































































