





























Parameters and firmware blocks
118
28.03
INTEGRATION TIME
FW block:
(see above)
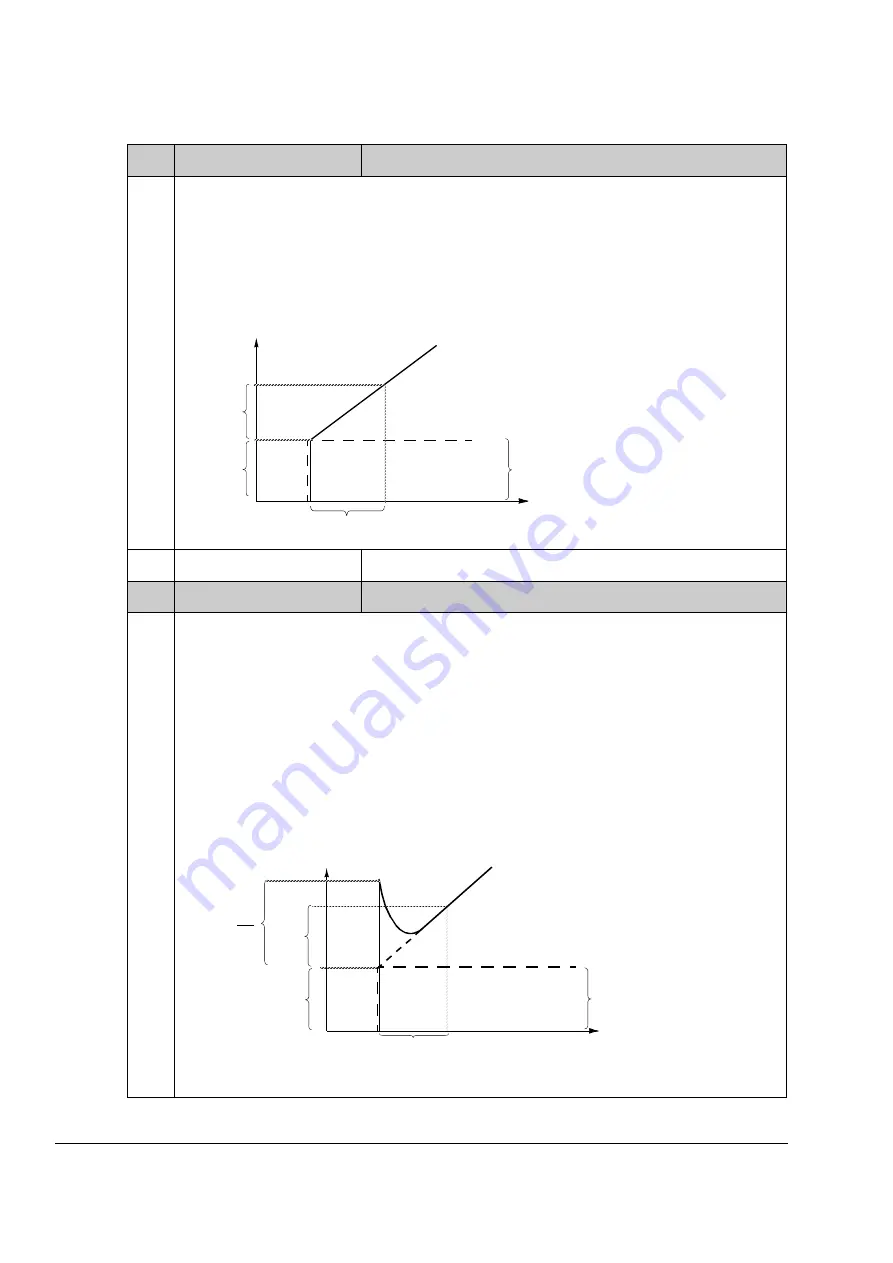
Defines the integration time of the speed controller. The integration time defines the rate at which the
controller output changes when the error value is constant and the proportional gain of the speed
controller is 1. The shorter the integration time, the faster the continuous error value is corrected. Too
short integration time makes the control unstable.
If parameter value is set to zero, the I-part of the controller is disabled.
Anti-windup stops the integrator if the controller output is limited. See
.
The figure below shows the speed controller output after an error step when the error remains
constant.
0…600 s
Integration time for speed controller.
28.04
DERIVATION TIME
FW block:
(see above)
Defines the derivation time of the speed controller. Derivative action boosts the controller output if the
error value changes. The longer the derivation time, the more the speed controller output is boosted
during the change. If the derivation time is set to zero, the controller works as a PI controller,
otherwise as a PID controller. The derivation makes the control more responsive for disturbances.
The speed error derivative must be filtered with a low pass filter to eliminate disturbances.
The figure below shows the speed controller output after an error step when the error remains
constant.
Note:
Changing this parameter value is recommended only if a pulse encoder is used.
T
I
Controller output
t
%
Gain = K
p
= 1
T
I
= Integration time > 0
T
D
= Derivation time = 0
K
p
· e
e = Error value
K
p
· e
T
I
K
p
· e
t
%
Gain = K
p
= 1
T
I
= Integration time > 0
T
D
= Derivation time > 0
T
s
= Sample time period = 250 µs
e = Error value
Δ
e = Error value change between two samples
K
p
·
T
D
·
De
T
s
K
p
· e
Controller output
Error value
Содержание ACSM1 Series
Страница 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Страница 2: ......
Страница 4: ......
Страница 12: ...Table of contents 12...
Страница 49: ...Drive control and features 49...
Страница 282: ...Standard function blocks 282...
Страница 306: ...Application program template 306...
Страница 312: ...Control chain block diagrams 312...
Страница 331: ...331...
Страница 332: ...332...
Страница 333: ......





















































