
















Reviews:
No comments
Related manuals for HRC-03-117137

AutoLink
Brand: ABB Pages: 11

P100
Brand: idiag Pages: 10

2290
Brand: Bandit Pages: 136

Versaflo S Series
Brand: 3M Pages: 11
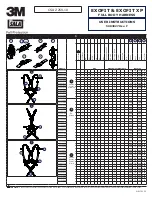
DBI Sala EXOFIT
Brand: 3M Pages: 32

746
Brand: 3M Pages: 8

WS Series
Brand: Accurate Bio-Medical Technology Pages: 35

624
Brand: ZIGBEE Pages: 4

Companion 5
Brand: CAIRE Pages: 38

BDC2002
Brand: Caframo Pages: 72

SkyVUE 8M
Brand: Campbell Pages: 2

S/5 Aespire
Brand: Datex-Ohmeda Pages: 80

D65
Brand: MacDon Pages: 2

7817
Brand: V-TAC Pages: 6

SP SPRINT
Brand: Gaspardo Pages: 16

PH100
Brand: Gastrodomus Pages: 4

HL Series
Brand: HANYOUNG NUX Pages: 2

CL
Brand: Gastrodomus Pages: 39





















































