




























INSTRUCTION MANUAL
Semi-automatic BOV Filling Machine Z-2323
A0310.02.2323.905.1.EN
Page 24/39
Regulation of proximity sensors placement on actuators
Magnetic proximity sensors are responsible for detecting actuators limit position, what is important
to maintain correctness of algorithm controlling the machine. Magnet is built in actuator piston and
sensor, after detecting it, is generating signal used to control other modules of the device. Wrong
placement of sensor on actuator may generate signal too early (actuator won’t make full scale
movement but sensor will inform about reaching limit position) or stop the machine (actuator has
performed a full scale movement but sensor, which is located too far, won’t detect it).
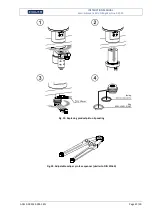
Correct sensors placement may be checked by observing pneumatic indicator on sensor. Protruded
indicator means that limit position is detected.
Fig. 15. Magnetic proximity sensor SMPO type:
a) indicator hidden back, b) indicator protruded
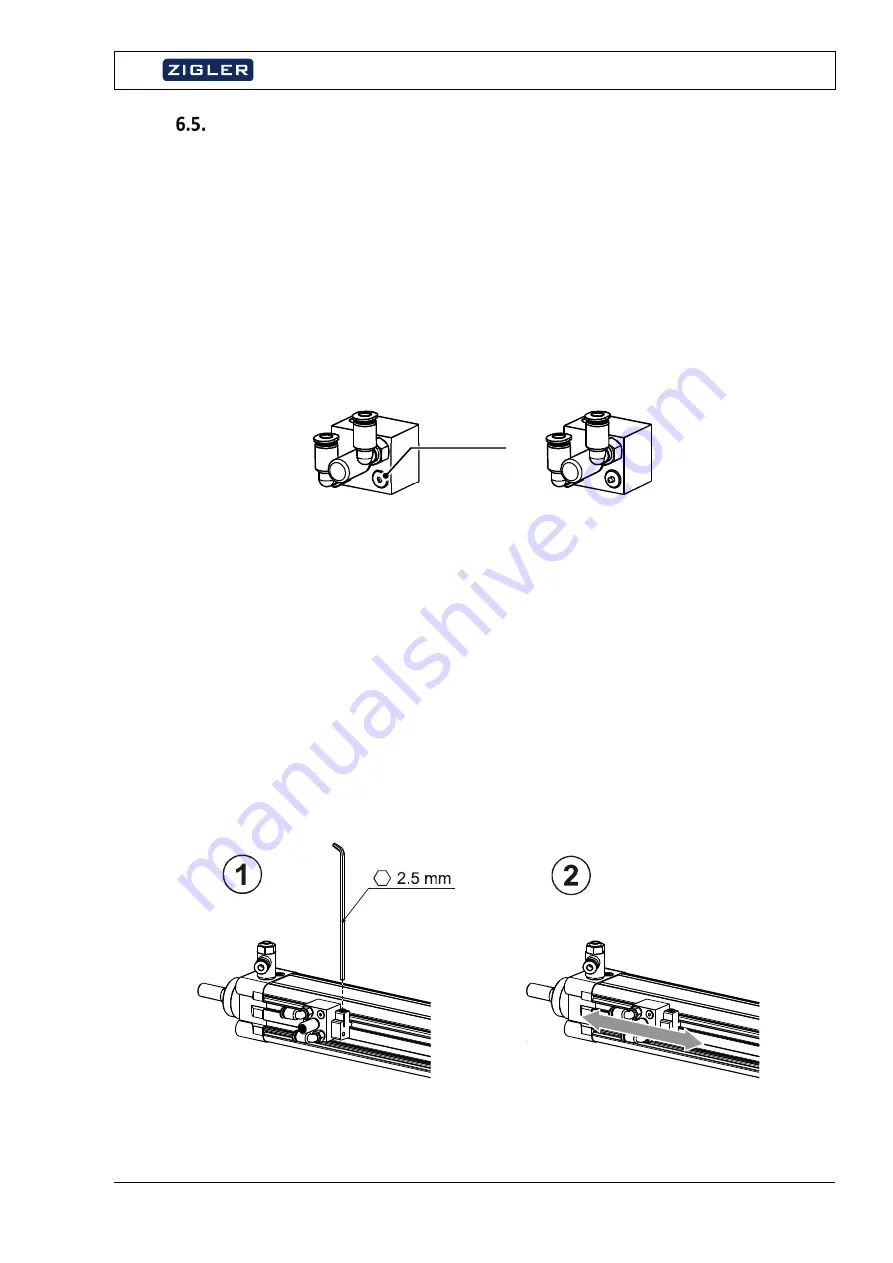
Compressed air supply has to be turned on during proximity sensors regulation. To adjust position
of sensor in square actuator groove it’s necessary to:
Make sure that compressed air supply is turned on and, with the help of 2,5 mm hex key,
untighten the bolt holding sensor (do not unscrew) - Fig. 16, pos. 1.
Move sensor along groove in actuator body to appropriate position - Fig. 16, pos. 2. It’s
necessary to observe pneumatic indicator – it should move forward when limit position is
detected.
To block sensor placement tighten up the bolt.
Fig. 16. Regulation of proximity sensor placement in actuator groove
a)
b)
Pneumatic
indicator
Summary of Contents for Z-2323
Page 42: ...PNEUMATIC DIAGRAMS ...







































































