


























1
2
3
4
5
6
7
App
Index
7-7
IM WT3001E-17EN
Status Reports
7.4 Extended Event Register
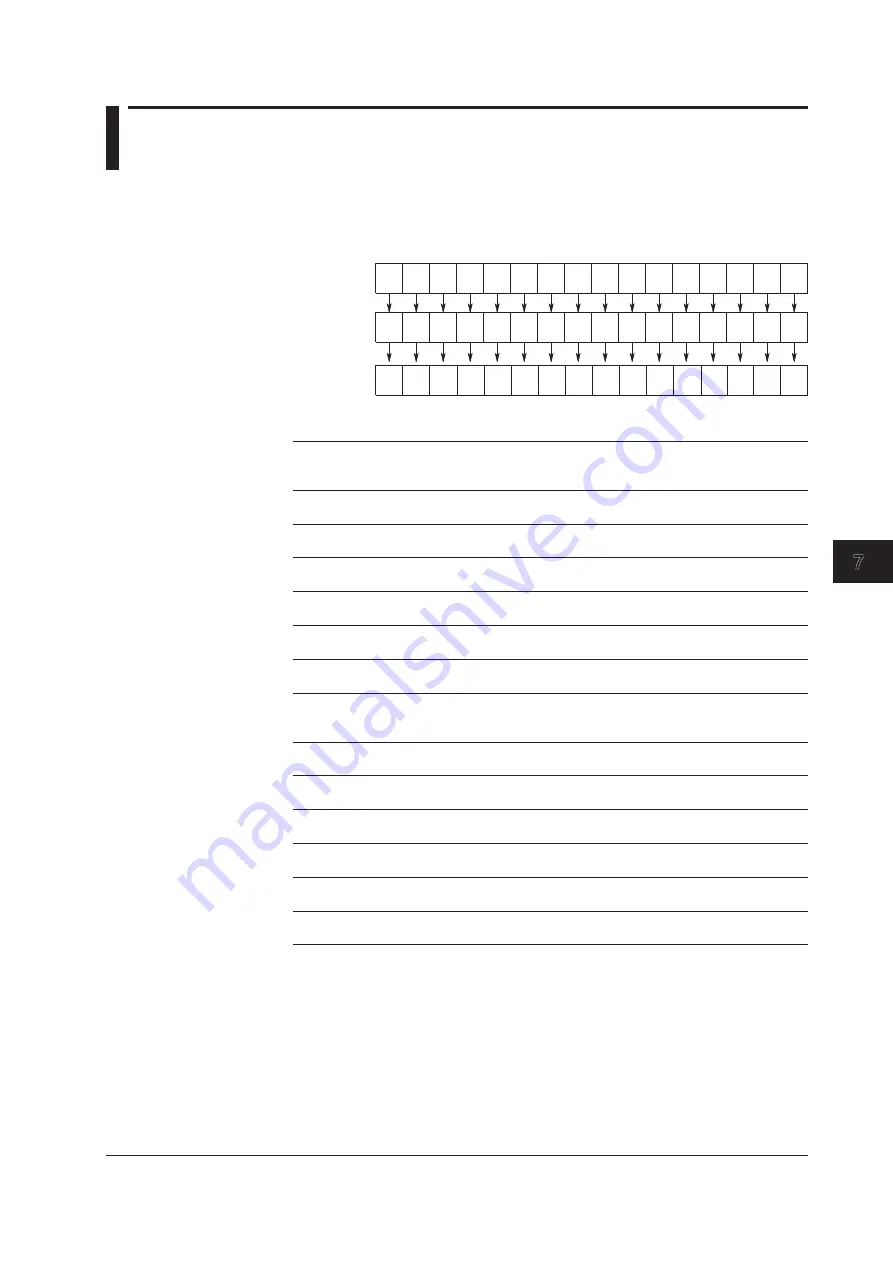
Reading the extended event register tells you whether changes in the condition register
(reflecting internal conditions) have occurred. A transition filter can be applied which
allows you to decide which events are reported to the extended event register.
ACS
6
PLLE
7
5
4
3
2
1
0
PRN
FOV
SRB
ITM
ITG
UPD
OVR1
8
OVR2
9
OVR3
10
OVR4
11
0
12
0
13
OVRM
14
POV
15
6
7
5
4
3
2
1
0
8
9
10
11
12
13
14
15
Condition register
:STATus:CONDition?
Transition filter
0
14
15
Extended event register
1
6
7
5
4
3
8
9
10
11
12
13
2
6
7
5
4
3
2
1
8
9
10
11
12
13
14
15
16
:STATus:FILTer<x>
{RISE|FALL|BOTH|NEVer}
:STATus:EESR?
FILTer<x> ->
The meaning of each bit of the condition register is as follows:
Bit 0
UPD (Updating)
Set to 1 when the measured data is being updated. The falling edge of UPD (1 -> 0) signifies the
end of the updating.
Bit 1
ITG (Integrate Busy)
Set to 1 while integration is in progress.
Bit 2
ITM (Integrate Timer Busy)
Set to 1 while the integration timer is running.
Bit 3
SRB (Store/Recall Busy)
Set to 1 while storing or recalling data.
Bit 4
FOV (Frequency Over)
Set to 1 when the frequency is in error.
Bit 5
PRN (Printing)
Set to 1 while the built-in printer is in operation or while data is being output to a network printer.
Bit 6
ACS (Accessing)
Set to 1 when the PC card interface, USB storage medium, or network drive is being accessed.
Bit 7
PLLE (PLL Source Input Error)
Set to 1 when there is no input to the PLL source and synchronization cannot be achieved during
harmonic measurement.
Bit 8
OVR1(Element1 Measured Data Over)
Set to 1 when the voltage or current of element 1 is overrange.
Bit 9
OVR2(Element2 Measured Data Over)
Set to 1 when the voltage or current of element 2 is overrange.
Bit 10 OVR3 (Element3 Measured Data Over)
Set to 1 when the voltage or current of element 3 is overrange.
Bit 11 OVR4 (Element4 Measured Data Over)
Set to 1 when the voltage or current of element 4 is overrange.
Bit 14 OVRM (Motor Measured Data Over)
Set to 1 when the speed or torque of the motor input is overrange.
Bit 15 POV (ElementX Input Peak Over)
Set to 1 when peak over (input exceeding the peak) is detected in any of the elements.