





























Installation
4
-
32
4
Installation
4.1
Transportation
CAUTION!
Personal injury or damage to property
The system consists of precision components. If this precaution is not taken, performance
may be impaired.
A crane or forklift may only be operated by authorized personnel. The same applies to
the use of slings.
Avoid strong vibrations or impacts during transportation.
No external forces may be exerted on the robot controller, on the robot or on other
components.
4.1.1
Transporting method
•
Check that the eyebolts are securely fastened.
•
The robot controller weighs approximately Approx. 70 kg. Use load-carrying devices
strong enough to withstand the weight.
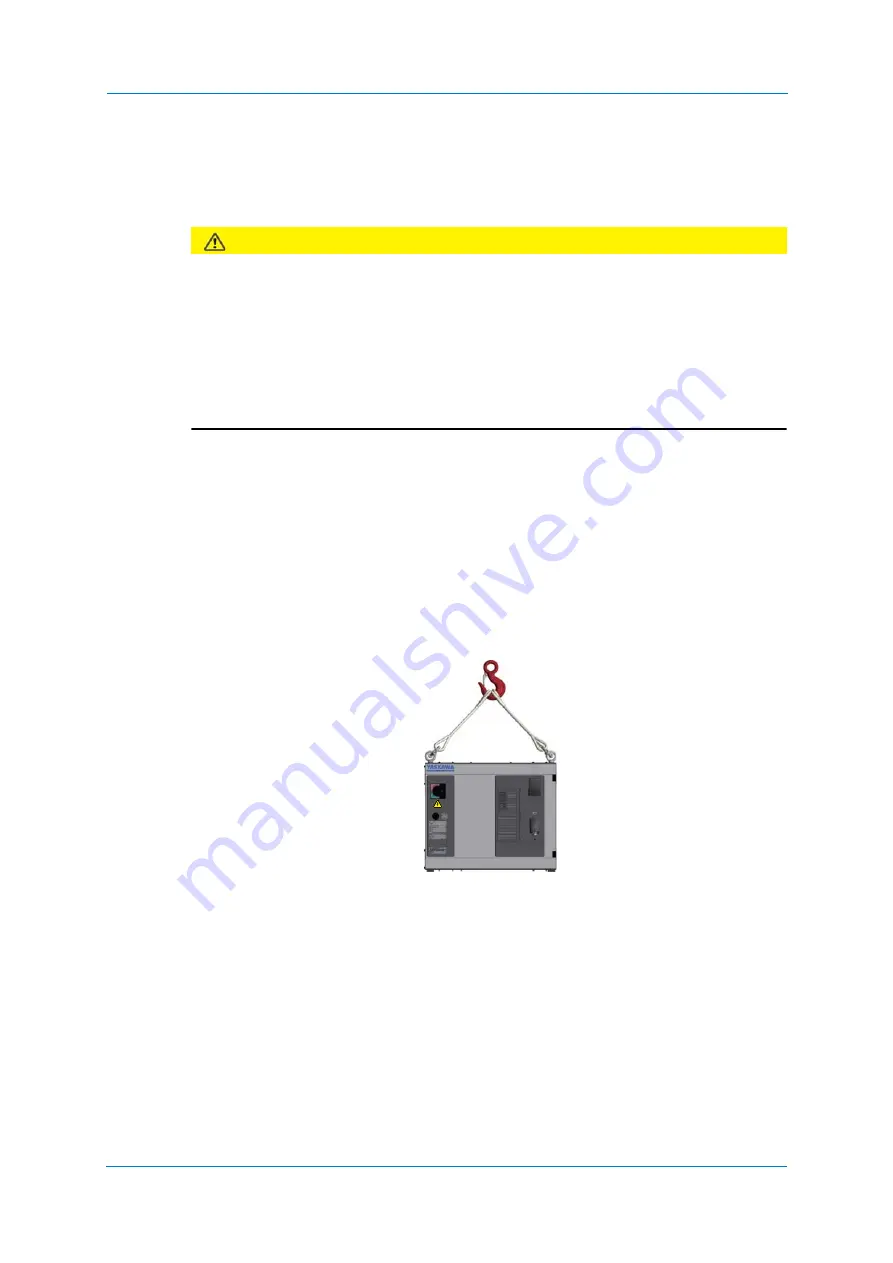
4.1.1.1
Using a crane
Adequate load handling devices must be used to transport the robot controller. Make sure
that the robot controller is lifted as shown in the diagram "Transport by crane" below.
Fig. 4-1: Transport using a crane
Summary of Contents for YRC1000
Page 1: ...ROBOTICS Instructions Robot controller User manual ...
Page 30: ...Supply 3 30 Hood for CEE connector Covers ...
Page 51: ...Connection 5 51 8 Close the YRC1000 door ...
Page 142: ...System Setup 9 142 6 Select YES All data of the interference signal number is deleted ...
Page 174: ...System Setup 9 174 7 Press ENTER The speed is modified ...
Page 219: ...System Setup 9 219 4 Select GRAPH The graph appears 4 5 6 7 8 9 10 1 2 3 ...
Page 453: ...Description of Units and Circuit Boards 15 453 ...





















































