





























5.2 b: Application
YASKAWA ELECTRIC
SIEP C710606 44B YASKAWA AC Drive T1000V Technical Manual
109
P
a
ra
me
te
r D
eta
ils
5
Setting 1: Control Circuit Terminal
This setting requires that the Run and Stop commands are entered from the digital input terminals. The following
sequences can be used:
• 2-Wire sequence 1:
Two inputs (FWD/Stop-REV/Stop). Initializing the drive by setting A1-01 = 2220, presets the terminals S1 and S2 to
these functions. This is the default setting of the drive.
Refer to Setting 40/41: Forward Run/Reverse Run Command
for 2-Wire Sequence on page 165
• 2-Wire sequence 2:
Two inputs (Start/Stop-FWD/REV).
Refer to Setting 42/43: Run and Direction Command for 2-Wire Sequence 2 on
• 3-Wire sequence:
Inputs S1, S2, S5 (Start-Stop-FWD/REV). Initialize the drive by setting A1-01 = 3330 presets the terminals S1, S2 and
S5 to these functions.
Refer to Setting 0: 3-Wire Sequence on page 160
Setting 2: MEMOBUS/Modbus Communications
To issue a Run command via serial communications, set b1-02 to “2” and connect the RS-485/422 serial communication
cable to R+, R-, S+, and S- on the removable terminal block.
Refer to MEMOBUS/Modbus Configuration on page 382
.
Setting 3: Option Card
To issue the Run command via the communication option board, set b1-02 to “3” and plug a communication option board
into the CN2 port on the control PCB. Refer to the manual supplied with the option board for instructions on integrating
the drive into the communication system.
Note:
If b1-01 is set to 3, but an option board is not installed in CN2, an oPE05 operator programming error will be displayed on the
digital operator and the drive will not run.
■
b1-03: Stopping Method Selection
Select how the drive stops the motor when a Stop command is entered or when the Run command is removed.
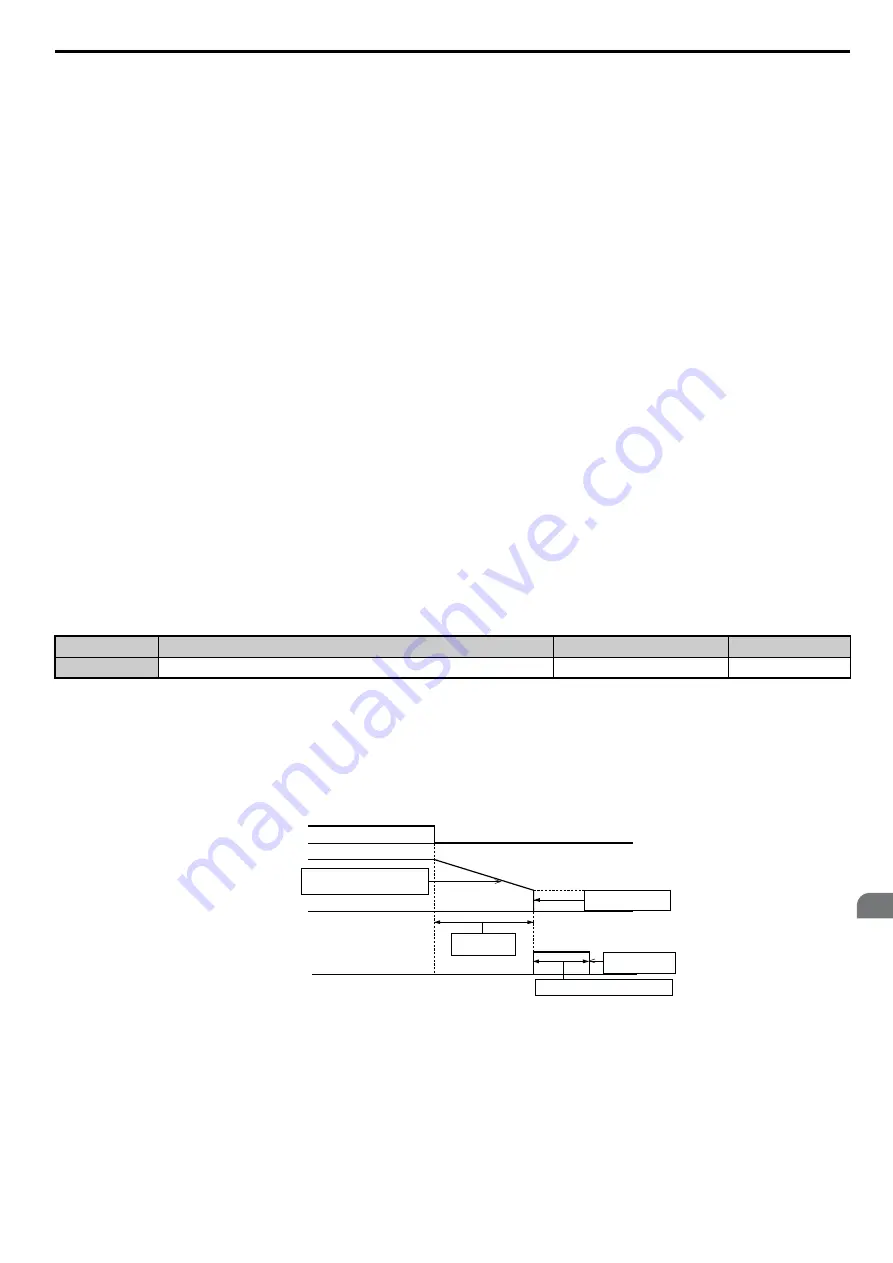
Setting 0: Ramp to Stop
When a Stop command is issued or the Run command is removed, the drive will decelerate the motor to stop. The
deceleration rate is determined by the active deceleration time. The default deceleration time is set to parameter C1-02.
DC Injection braking (for IM control) or Short Circuit Braking (PM Open Loop Vector) can be applied at the end of the
ramp in order to completely stop high inertia loads.
Refer to b2: DC Injection Braking on page 113
for details.
Figure 5.4
Figure 5.4 Ramp to Stop
Setting 1: Coast to Stop
When a Stop command is issued or the Run command is removed, the drive will shut off its output and the motor will
coast (uncontrolled deceleration) to stop where the stopping time is determined by the inertia and the friction in the
driven system.
No.
Parameter Name
Setting Range
Default
b1-03
Stopping Method Selection
0 to 3
0
Run Command
Decelerates according to the
specified deceleration time
Zero Speed Level
(b2-01)
DC Injection
Current (b2-02)
DC Braking Time at Stop (b2-04)
Decel Time
(C1-02, etc.)
Maximum
Output Frequency
DC Injection Braking
ON
OFF