





























54
YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual
3.7 Main Circuit Wiring
3.7
Main Circuit Wiring
This section describes the functions, specifications, and procedures required to safely and properly wire the main circuit
in the drive.
NOTICE: Do not solder the ends of wire connections to the drive. Soldered wiring connections can loosen over time. Improper wiring
practices could result in drive malfunction due to loose terminal connections.
NOTICE: Do not switch the drive input to start or stop the motor. Frequently switching the drive on and off shortens the lifetime of the
DC bus charge circuit and the DC bus capacitors, and can cause premature drive failures. For the full performance life, refrain from
switching the drive on and off more than once every 30 minutes.
u
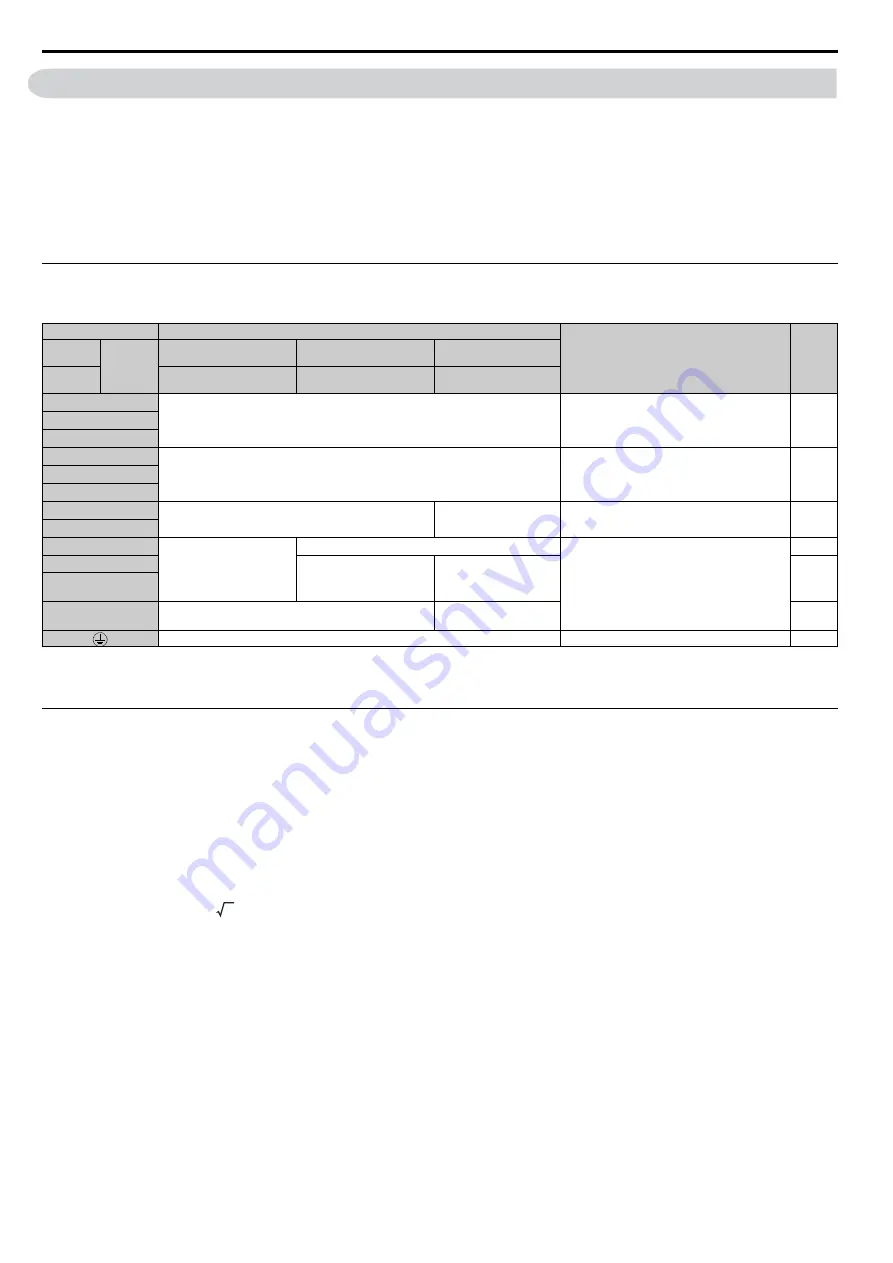
Main Circuit Terminal Functions
Table 3.2 Main Circuit Terminal Functions
Note:
For drives that have a built-in braking transistor (models CIMR-T
2A0004 to 2A0138 and 4A0002 to 4A0072), connect the
braking resistor to the B1 terminal and the negative terminal.
u
Wire Gauges and Tightening Torque
Select the appropriate wires and crimp terminals from
.
Note: 1.
Wire gauge recommendations based on drive continuous current ratings (ND) using 75°C 600 Vac vinyl-sheathed wire assuming
ambient temperature within 40°C and wiring distance less than 100 m.
2.
Ter1, +2, +3, –, B1 and B2 are for connecting optional devices such as a DC reactor or braking resistor. Do not connect other
nonspecific devices to these terminals.
• Consider the amount of voltage drop when selecting wire gauges. Increase the wire gauge when the voltage drop is
greater than 2% of motor rated voltage. Ensure the wire gauge is suitable for the terminal block. Use the following
formula to calculate the amount of voltage drop:
Line drop voltage (V)=
×
wire resistance (
Ω
/km)
×
wire length (m)
×
motor rated current (A)
×
10
-3
• Refer to instruction manual TOBP C720600 00 for braking unit or braking resistor unit wire gauges.
• Use te1 and the negative terminal when connecting a regenerative converter or a regen unit.
• Use the +3 terminal and the negative terminal to connect the braking transistor unit. For drives that have a built-in
braking transistor (models CIMR-T
2A0004 to 2A0138 and 4A0002 to 4A0072), connect the braking resistor to the
B1 terminal and the negative terminal.
•
Refer to UL Standards Compliance on page 481
for information on UL compliance.
Terminal
Type
Function
Page
200 V
Class
Model
CIMR-T
2A0004 to 2A0081
2A0110 to 2A0138
2A0169 to 2A0415
400 V
Class
4A0002 to 4A0044
4A0058, 4A0072
4A0088 to 4A0362
R/L1
Main circuit power supply input
Connects line power to the drive
S/L2
T/L3
U/T1
Drive output
Connects to the motor
V/T2
W/T3
B1
Braking resistor
not available
Available for connecting a braking resistor or a
braking resistor unit option
B2
+2
• DC reactor connection (+1,
+2) (remove the shorting bar
b1 and +2)
• DC power supply input (+1,
–)
not available
For connection
• of the drive to a DC power supply
• of braking options
• connection of a DC reactor
+1
DC power supply input
(+1, –)
DC power supply input
(+1, –)
–
–
+3
not available
Braking transistor
connection (+3, –)
–
Grounding terminal
3







































































