
























Technical data
6
-
31
6.1
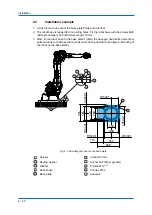
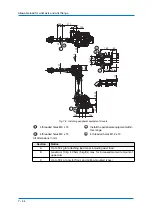
Parts and work axis label
Fig. 6-1: Part names and working axes
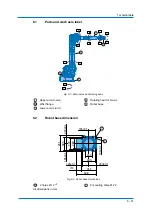
6.2
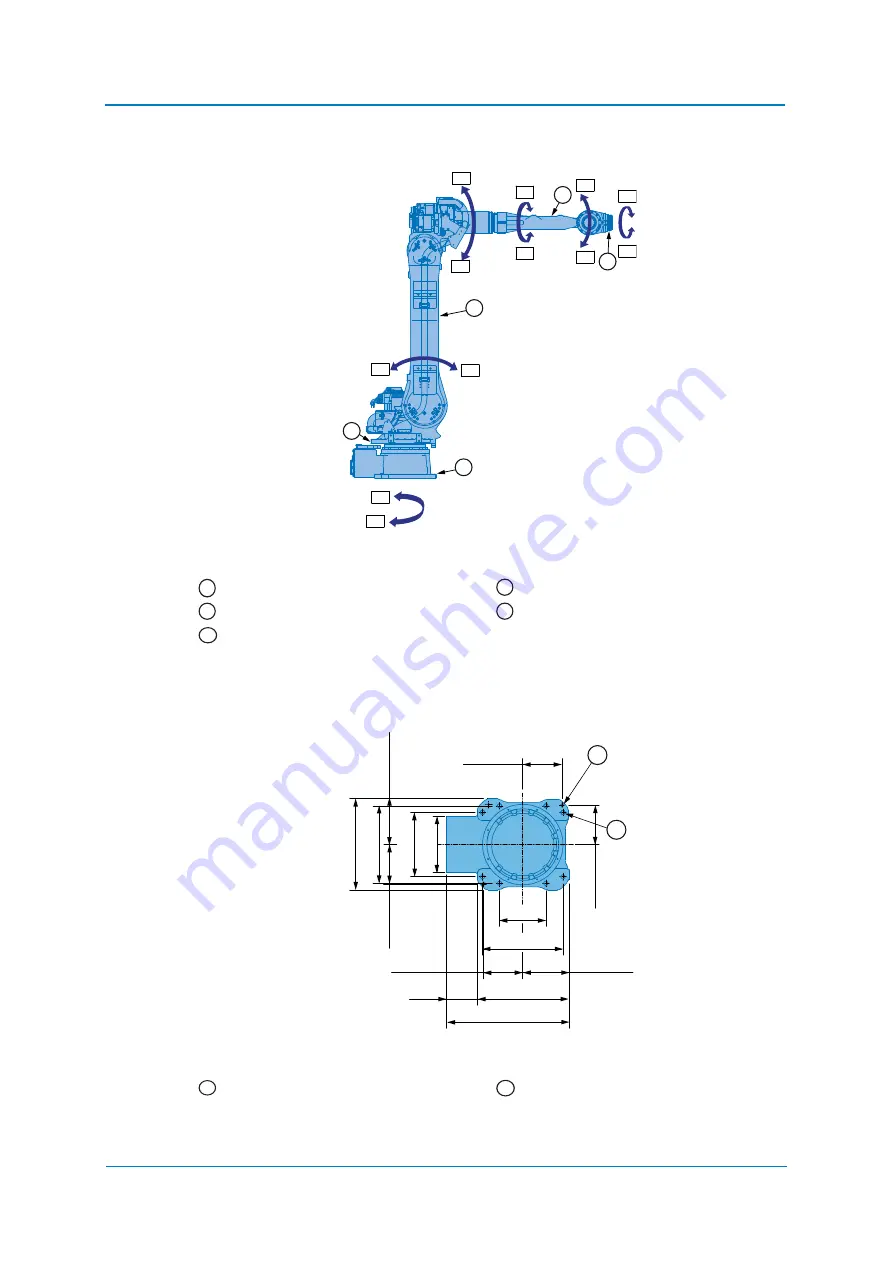
Robot base dimension
Fig. 6-2: Robot base dimensions
Upper arm (U-arm)
Rotating head of S-axis
Wrist flange
Robot base
Lower arm (L-arm)
2 holes Ø 12
H7
8 mounting holes Ø 22
All dimensions in mm
1
2
3
5
4
T+
T‑
B‑
B+
R+
R‑
U‑
U+
L‑
L+
S‑
S+
1
4
2
5
3
230
400
195±0.1
230±0.1
195±0.1
195±0.
1
320
385
230±0.
1
195±0.
1
455
608
455
153
280
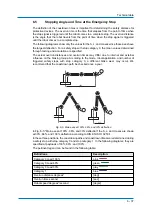
1
2
1
2


































































