




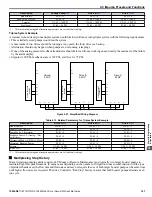

























The wait time t is determined by the output frequency when the Run command is removed and by the active deceleration time.
Min output
frequency
100%
(Max output
frequency)
Output frequency
when Stop command
was entered
Run wait time t
Active deceleration time
Min Baseblock Time (L2-03)
Figure 4.32 Run Wait Time Depending on Output Frequency
n
b3-01: Speed Search Selection at Start
Determines if Speed Search is automatically performed when a Run command is issued.
No.
Parameter Name
Setting Range
Default
b3-01
Speed Search Selection at Start
0, 1
0
Setting 0: Disabled
This setting starts operating the drive at the minimum output frequency when the Run command is entered. If external Speed
Search 1 or 2 is already enabled by a digital input, the drive will start operating with Speed Search.
Setting 1: Enabled
This setting performs Speed Search when the Run command is entered. The drive begins running the motor after Speed Search
is complete.
n
b5-01: PID Function Setting
Enables and disables the PID operation and selects the PID operation mode.
No.
Parameter Name
Setting Range
Default
b5-01
PID Function Setting
0, 1
0
Setting 0: PID disabled
Setting 1: Output frequency = PID output 1
The PID controller is enabled and the PID output builds the frequency reference. The PID input is D controlled.
n
b5-03: Integral Time Setting (I)
Sets the time constant used to calculate the integral of the PID input. The shorter the integral time set to b5-03, the faster the
offset will be eliminated. If the integral time is set too short, however, overshoot or oscillation may occur. To turn off the
integral time, set b5-03 to 0.00.
No.
Name
Setting Range
Default
b5-03
Integral Time Setting (I)
0.0 to 360.0 s
1.0 s
n
b5-09: PID Output Level Selection
Reverses the sign of the PID controller output signal. Normally a positive PID input (feedback smaller than setpoint) leads to
positive PID output.
No.
Parameter Name
Setting Range
Default
b5-09
PID Output Level Selection
0, 1
0
Setting 0: Normal Output
A positive PID input causes an increase in the PID output (direct acting).
Setting 1: Reverse Output
A positive PID input causes a decrease in the PID output (reverse acting).
4.6 Basic iQpump Setup and Application Preset Parameters
156
YASKAWA
TOEP YAIP1W 01A YASKAWA AC Drive - iQpump1000 Quick Start Guide
Summary of Contents for iQpump1000
Page 355: ......







































































