





























b2-04
b2-01
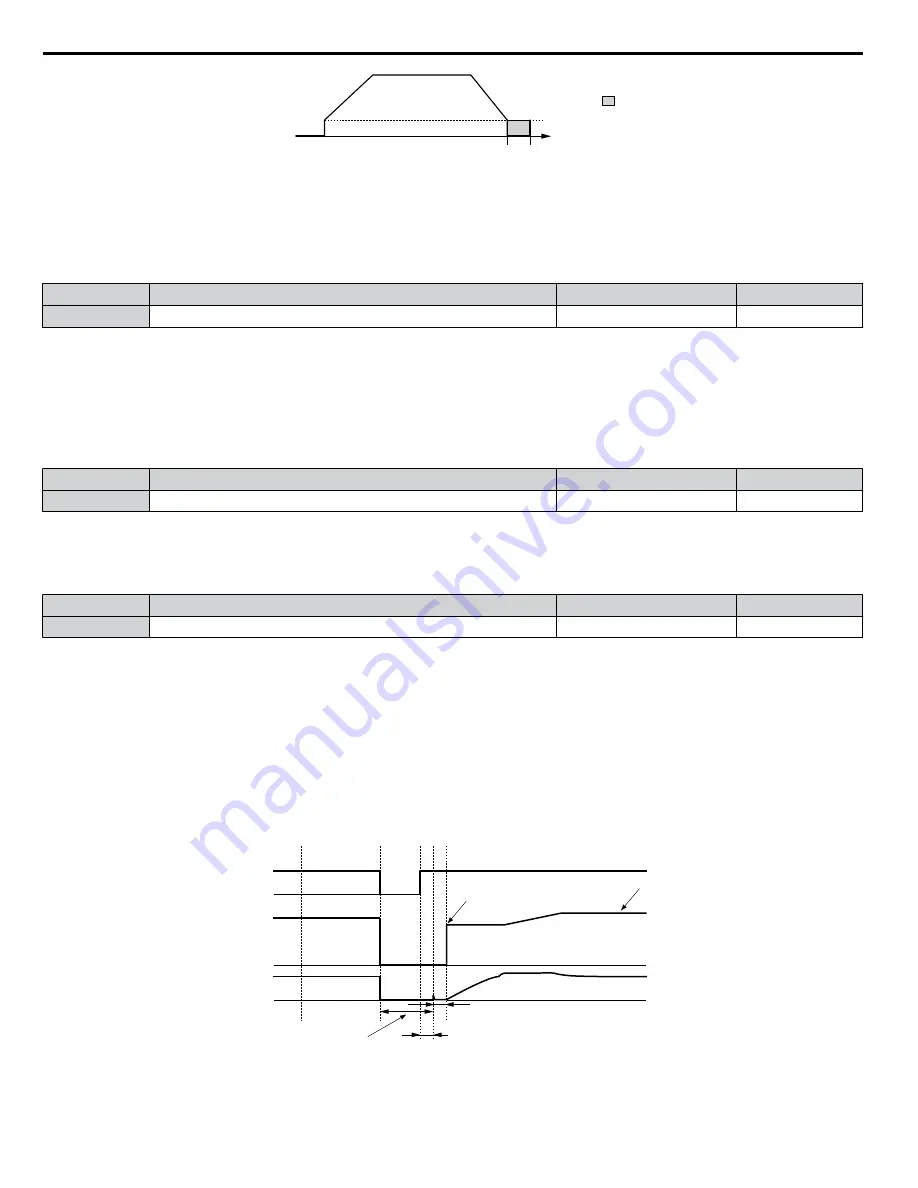
DC Injection Braking
start frequency
output
frequency
braking time
Figure 5.12 DC Injection Braking during Deceleration
n
b2-02: DC Injection Braking Current
Sets the DC Injection Braking current as a percentage of the drive rated current. If set to larger than 50%, the carrier frequency
is automatically reduced to 1 kHz.
No.
Name
Setting Range
Default
b2-02
DC Injection Braking Current
0 to 75%
50%
The level of DC Injection Braking current affects the strength of the magnetic field attempting to lock the motor shaft.
Increasing the current level will increase the amount of heat generated by the motor windings. This parameter should only be
increased to the level necessary to hold the motor shaft.
n
b2-03: DC Injection Braking Time at Start
Sets the time of DC Injection Braking at start. It can be used to stop a coasting motor before restarting it or to apply a braking
torque at start. Disabled when set to 0.00 s.
No.
Name
Setting Range
Default
b2-03
DC Injection Braking Time at Start
0.00 to 10.00 s
0.50 s
n
b2-04: DC Injection Braking Time at Stop
This parameter works in combination with b2-01, and sets the DC Injection Braking time at stop. Used to completely stop a
motor with high inertia load after ramp down. Increase the setting if the motor tends to coast by inertia after a stop.
No.
Name
Setting Range
Default
b2-04
DC Injection Braking Time at Stop
0.00 to 10.00 s
0.50 s
n
Speed Estimation Type Speed Search (b3-24 = 1)
This method can be used for a single motor connected to a drive. It should not be utilized if the motor is one or more frame
sizes smaller than the drive, at motor speeds above 130 Hz, or when using a single drive to operate more than one motor.
The Speed Estimation type distinguishes two kinds of operation, Back EMF voltage estimation and DC current injection.
Back EMF Voltage Estimation
This method is used by Speed Search after short Baseblock (e.g. a power loss where the drives CPU kept running and the Run
command was kept active). Here the drive estimates the motor speed by analyzing the back EMF voltage. It outputs the
estimated frequency and increases the voltage using the time constant set in parameter L2-04. After that the motor is accelerated
or decelerated to the frequency reference starting from the detected speed.
AC power
supply
Output
frequency
Output
current
OFF
ON
Starts at the detected speed
Selected
frequency
reference
Min. Baseblock Time
(L2-03)
Several milliseconds
b3 -05 <1>
Figure 5.13 Speed Search after Baseblock
5.2 b: Application
124
YASKAWA
TOEP YAIQPM 03B YASKAWA AC Drive - iQpump Micro User Manual
Summary of Contents for iQpump Micro CIMR-PW Series
Page 443: ......







































































