





























6-1
183574-1CD
183574-1CD
6
Alarms and Messages
6.1 Alarms Based on Barrier Door Operation
ArcWorld 50/50S/52/52S
6
Alarms and Messages
This section contains information on alarms that are generated by the
Controller. Cause and resolution of each alarm are presented to help with
troubleshooting. For additional help contact Customer Support.
6.1 Alarms Based on Barrier Door Operation
Many of the alarm text below are for Station 1 (ST1). These alarms may
also occur for Station 2, in that case the alarm text will show “ST2” instead
of “ST1”.
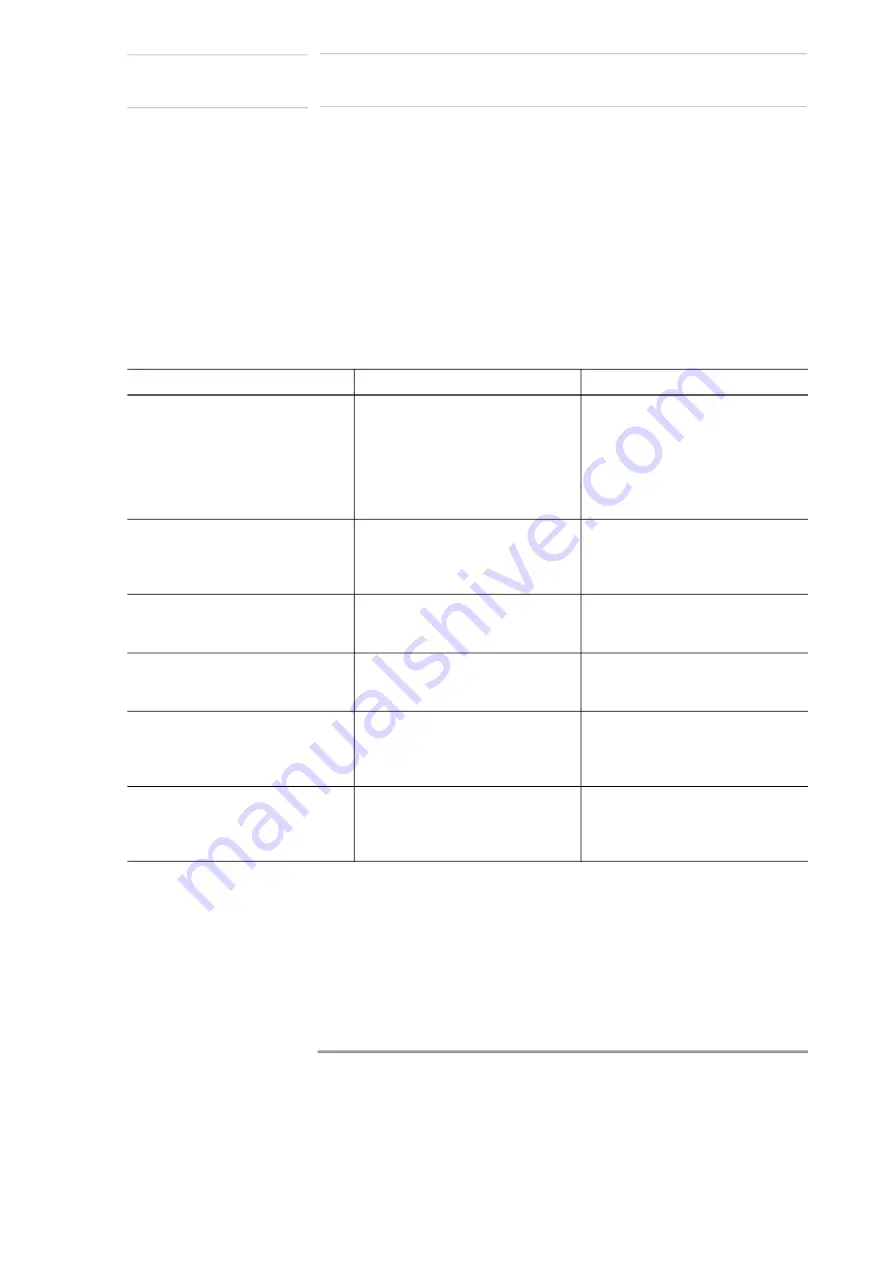
Table 6
-
1: Barrier Door Alarms
1)
Alarm Text
Alarm Cause
Suggested Resolutions
ST1 Barrier Fault Occurred
Some sort of alarm in the VFD
which provides motion to the door.
- Press corresponding general
output to reset the VFD.
Station 1 = OUT #2027
Station 2 = OUT #2059
Some alarms can only be cleared
by cycling power to the control
drive. These are not typical.
ST1 Door Overtime Flt
Door was moving longer than
4.0 seconds. The total door cycle
time is expected to be under
3.0 seconds.
Check for mechanical failure of the
door, or failures in Raised or Lower
switches.
ST1 Door Raised Not On
Door was moving up longer than
5 seconds and the “Door Raised”
switch never engaged.
Investigate Door Raised proximity
switch. Check for proper operation
in Manual mode. Verify cabling.
ST1 Door Raised Not Off
Door was moving down longer
than 5 seconds and the “Door
Raised” switch stayed on.
Investigate Door Raised proximity
switch. Check for proper operation
in Manual mode. Verify cabling.
ST1 Door Lowered Not On
Door was moving down longer
than 5 seconds and the “Door
Lowered” switch never engaged.
Investigate Door Lowered
proximity switch. Check for proper
operation in Manual mode. Verify
cabling.
ST1 Door Lowered Not Off
Door was moving up longer than
5 seconds and the “Door Lowered”
switch stayed on.
Investigate Door Lowered
proximity switch. Check for proper
operation in Manual mode. Verify
cabling.
1 Inputs to Reference:
· ST1 Door Lowered = IN #2019
· ST1 Door Raised = IN #2020
· ST1 Door Fault (VFD) = IN #2030
· ST2 Door Lowered = IN #2051
· ST2 Door Raised = IN #2052
· ST2 Door Fault (VFD) = IN #2062
89 of 126







































































