




























3-3
3-2
Robot oper
ation
3
Notes on robot operation
1.3 Return to origin (incremental specification)
■
Origin position
• On the incremental specification, return-to-origin must be performed after turning
power on before starting operation. Magnetic poles are also detected during return-
to-origin. Once return-to-origin is completed, there is no need to perform it again
unless the controller power is turned off or an error occurs.
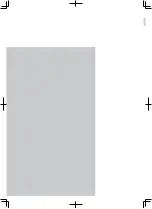
• There are two positions at which the origin can be set. These are located one
each on both ends of the stroke. Refer to the outline dimension drawings shown
in Chapter 7, "Specifications". Unless specified otherwise, the origin position is
set on the L side prior to shipment. The origin position can be set on the R side
by changing the parameter. (See the separate "SR1 Controller User's Manual" for
information on changing the parameter.)
Return-to-origin direction
L side
R side
: Magnetic pole detection point
L side
R side
Slider
: Magnetic pole detection point
Cable carrier
■
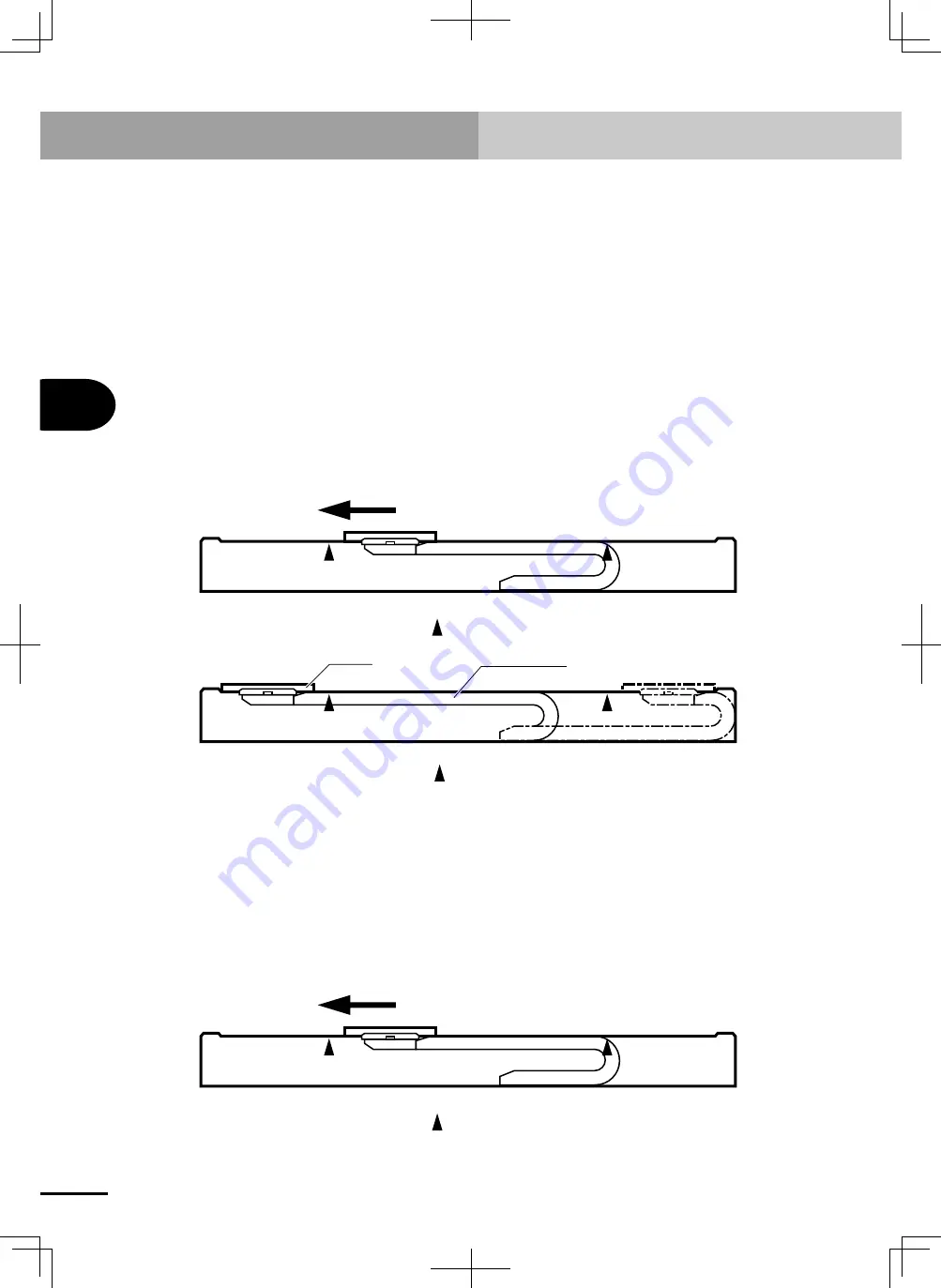
Return-to-origin operation
• Return-to-origin speed is set at 20 (mm per second) prior to shipment. This speed
can be changed in increments of 1 to 100 (mm per second) by parameter entry.
• Return-to-origin sequence: Robot moves as follows by entering a return- to-origin
command or a return-to-origin operation from the HPB.
(1) Slider moves in the specified return-to-origin direction at a speed set by the
parameter.
Return-to-origin direction
L side
R side
: Magnetic pole detection point