





























xiQ - Technical Manual Version 1.35
69
4.3.
Acquisition modes
4.3.1.
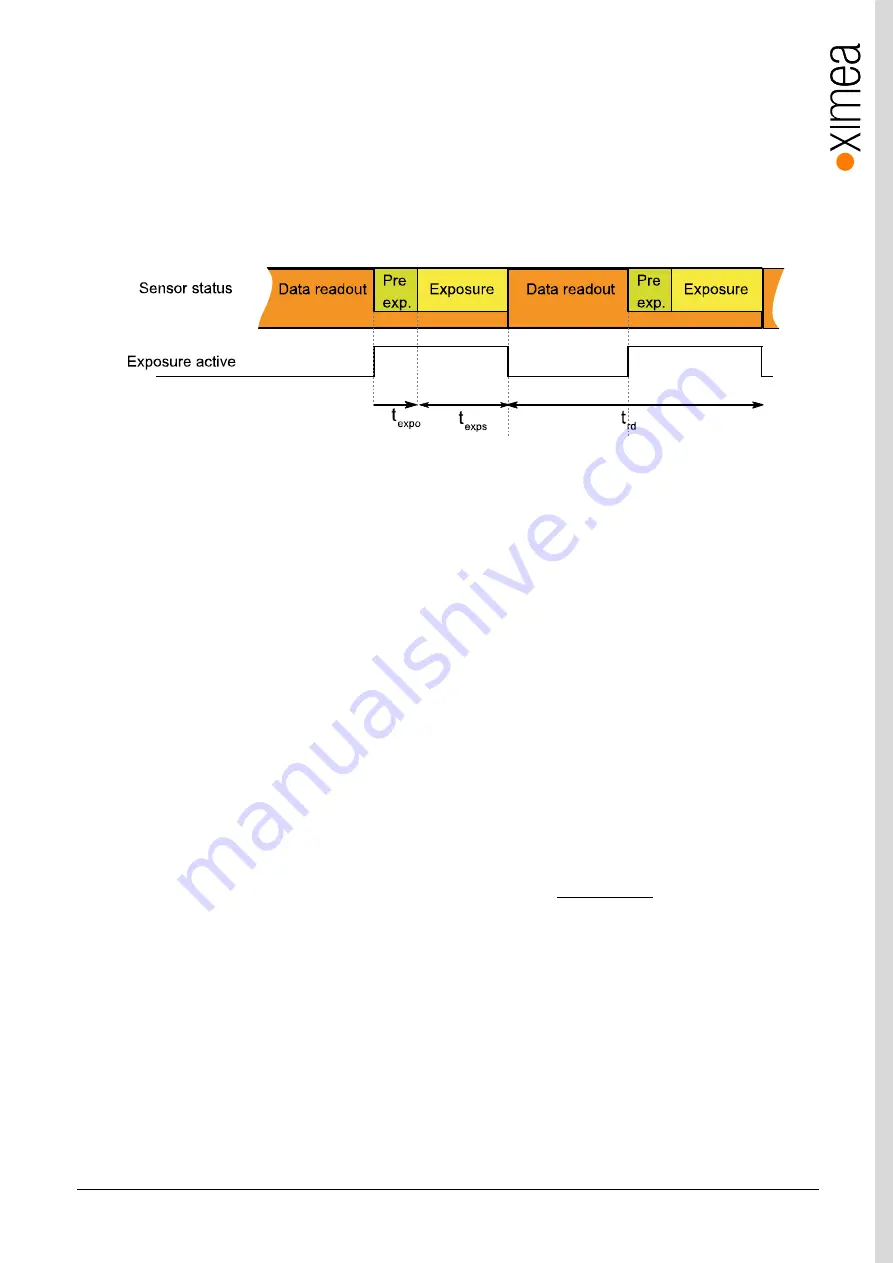
Free-Run
Also known as continuous acquisition. In this mode the sensor delivers a constant stream of image data at the maximum speed
available by the current bandwidth, without any external trigger. Each image exposition is started automatically when possible.
For all sensors the exposure of the next frame overlaps with the data readout of the previous frame.
This Overlapped mode gives the highest number of frames per second (FPS).
figure 4-1, acquisition mode - free run
In this mode the timing depends on the Exposure Time and Data Readout Time.
All xiC cameras support limiting of FPS. When set the camera will limit the frame rate so it does not exceed the set value.
Please see:
Frame_Rate_Control: https://www.ximea.com/support/wiki/allprod/Frame_Rate_Control
This is also applicable in case of triggered acquisition.
4.3.2.
Trigger controlled Acquisition/Exposure
Unlike in the free-run, each image exposure can also be triggered with an input trigger signal. In this mode, the sensor waits in
stage until the trigger signal arrives. Only then, the exposure of first frame is started, which is followed by the data readout. Ximea
cameras supports several triggered modes along with single image exposure after one trigger. The trigger signal can be either
edge sensitive or level sensitive. In case of level sensitive it can used to control length of exposure or acquisition itself.
Generally trigger sources can be divided in to two groups:
Software Trigger
The trigger signal can be sent to the sensor using a software command. In this case, common system related latencies and jitter
apply.
Hardware Trigger
A hardware trigger can be send to the sensor using the digital input described in
Triggering by hardware is usually used to reduce latencies as well as jitter in applications that require the most accurate timing.
In this case rising edge of input signal is suggested as the delay of opto coupler is smaller as well as introduced jitter. Triggering
by hardware is usually used to reduce latencies and jitter in applications that require the most accurate timing.







































































