























iR-PU01-P
5
When warning, PU will specify a lower target velocity, and remove jerk limitation and
finish positioning. To keep the jerk limitation, user may adjust target velocity,
acceleration/deceleration rate to avoid warning.
Error
4.3
Errors are indicated in the following ways:
Error LED is on
ErrorID of Function Block is AXIS_MOTION_ERROR
The status of the axis is ErroStop
When an error occurs, find the error code and troubleshoot the error. Use MC_Reset
to clear the error, and then use MC_Power to make the axis return to Standstill state.
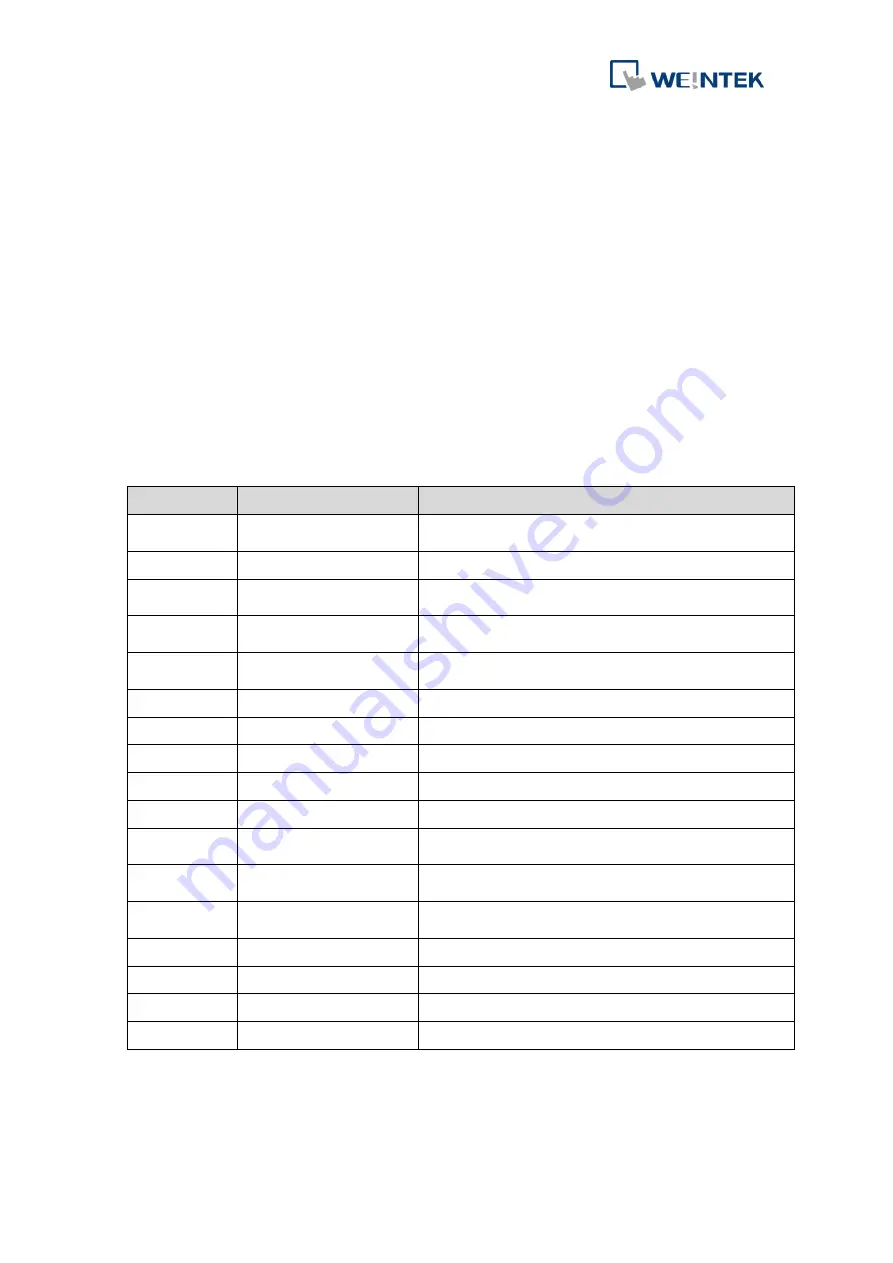
Error Code
Description
Cause of Error
16#6180
Motion Error 0
MC_POWER is OFF during motion. (Disconnected, or PLC
Stop/Reset).
16#6181
Motion Error 1
Changes to an incorrect mode (CiA402) during motion.
16#6182
Motion Error 2
iR-PU01-P calculates trajectory incorrectly. (Including
errors caused by Blending.)
16#618A
Homing Error
Incorrect Homing mode or an external signal that is not
configured is used.
16#6280
Software Limitation
The position is going to exceed or already exceeds the
software limitation.
16#6281
Prohibited Direction
Movement in prohibited direction.
16#8612
Exceeding Position Range
Target position exceeds software limitation or axis range.
16#6320
Function Block Error
Invalid parameters used.
16#6380
Parameter Error 0
Incorrect pulse output mode used.
16#6381
Parameter Error 1
Incorrect pulse output mode used.
16#6382
Parameter Error 2
The product of the numerator and denominator of the
ratio is too large. (INT_MAX)
16#6383
Parameter Error 3
The product of the numerator and denominator of the
ratio of the 1
st
axis is too large.
16#6384
Parameter Error 4
The product of the numerator and denominator of the
ratio of the 2
nd
axis is too large.
16#9080
External Signal Error 0
Positive limit signal is triggered.
16#9081
External Signal Error 1
Negative limit signal is triggered.
16#9082
External Signal Error 2
Immediate stop signal is triggered.
16#7500
Communication Error
Disconnection or Heartbeat Timeout has occurred.







































































