





























69/108
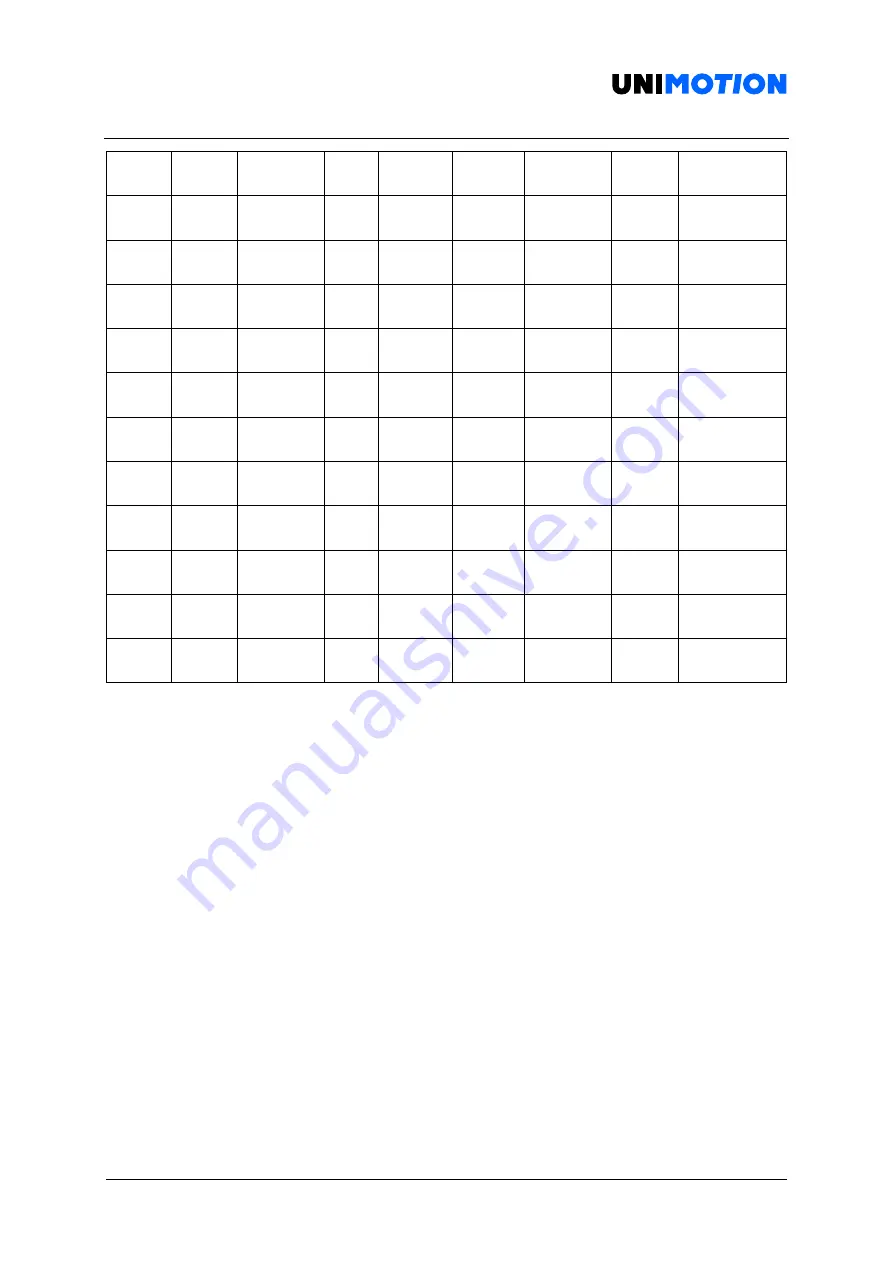
6.3.3 Object 1A00h: TxPDO-Map 0
Index Sub
Index
Name
Type Access SAVE
PDO
Mapping
Value
Range
Default
Value
1A00h 0
Number
of entries
U8
RW
No
No
0
∼
10 2
1
1st PDO
object
U32 RW
Yes
No
6041 0010h
2
2nd PDO
object
U32 RW
Yes
No
6064 0020h
3
3rd PDO
object
U32 RW
Yes
No
0000 0000h
4
4th PDO
object
U32 RW
Yes
No
0000 0000h
5
5th PDO
object
U32 RW
Yes
No
0000 0000h
6
6th PDO
object
U32 RW
Yes
No
0000 0000h
7
7th PDO
object
U32 RW
Yes
No
0000 0000h
8
8th PDO
object
U32 RW
Yes
No
0000 0000h
9
9th PDO
object
U32 RW
Yes
No
0000 0000h
10
10th PDO
object
U32 RW
Yes
No
0000 0000h
This object points TxPDO 0 information among TxPDO setting.
Following objects are already mapping: Status word (6041h), Position Actual Value (6064h).
TxPDO-Map 0 is configurable. Please refer to
3.2 PDO Mapping.







































































