





























82
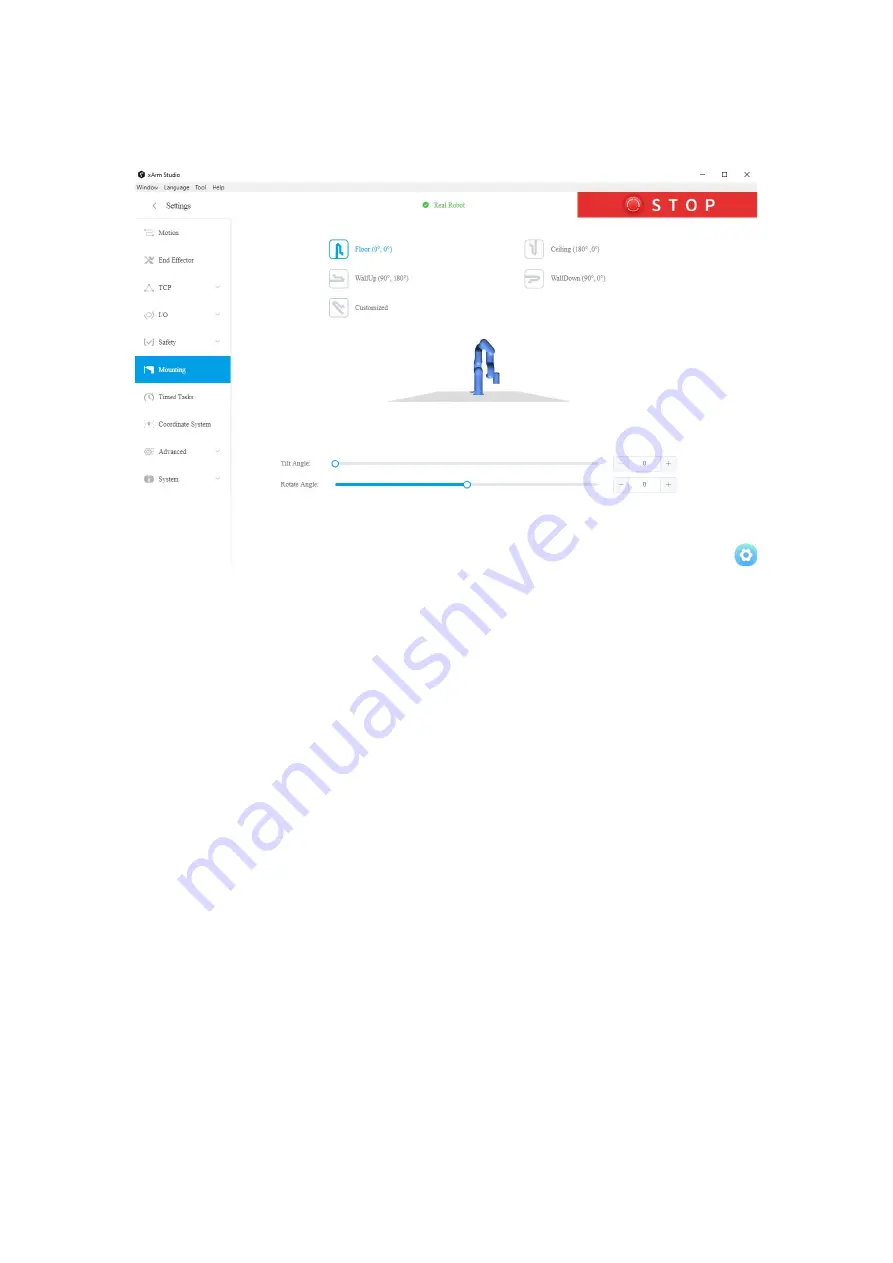
1.4.6 Mounting
Setting the mounting direction of the robotic arm is mainly to inform the control box
of the current relationship between the actual mounting direction of the robotic arm
and the direction of gravity. If the mounting direction of the robotic arm is set
incorrectly, the robotic arm will not be able to accurately recognize the direction of
gravity, which will cause the robotic arm to frequently trigger a collision warning and
stop motion, and will also result in uncontrolled motion of the robotic arm after
entering manual mode.
【
Floor (0 °, 0 °)
】
● The default method is horizontal installation, and the horizontally mounted robotic
arm does not need a tilt angle and a rotation angle.
【
Ceiling (180 °, 0 °)
】
● For ceiling-mount, users simply need to set the mounting method as ceiling, and it
is not necessary to set the angle of rotation.
【
WallUp (90 °, 180 °)
】
●
Indicates that the robotic arm is wall-mounted and the end of the robotic arm is
facing up.


























































