





























10
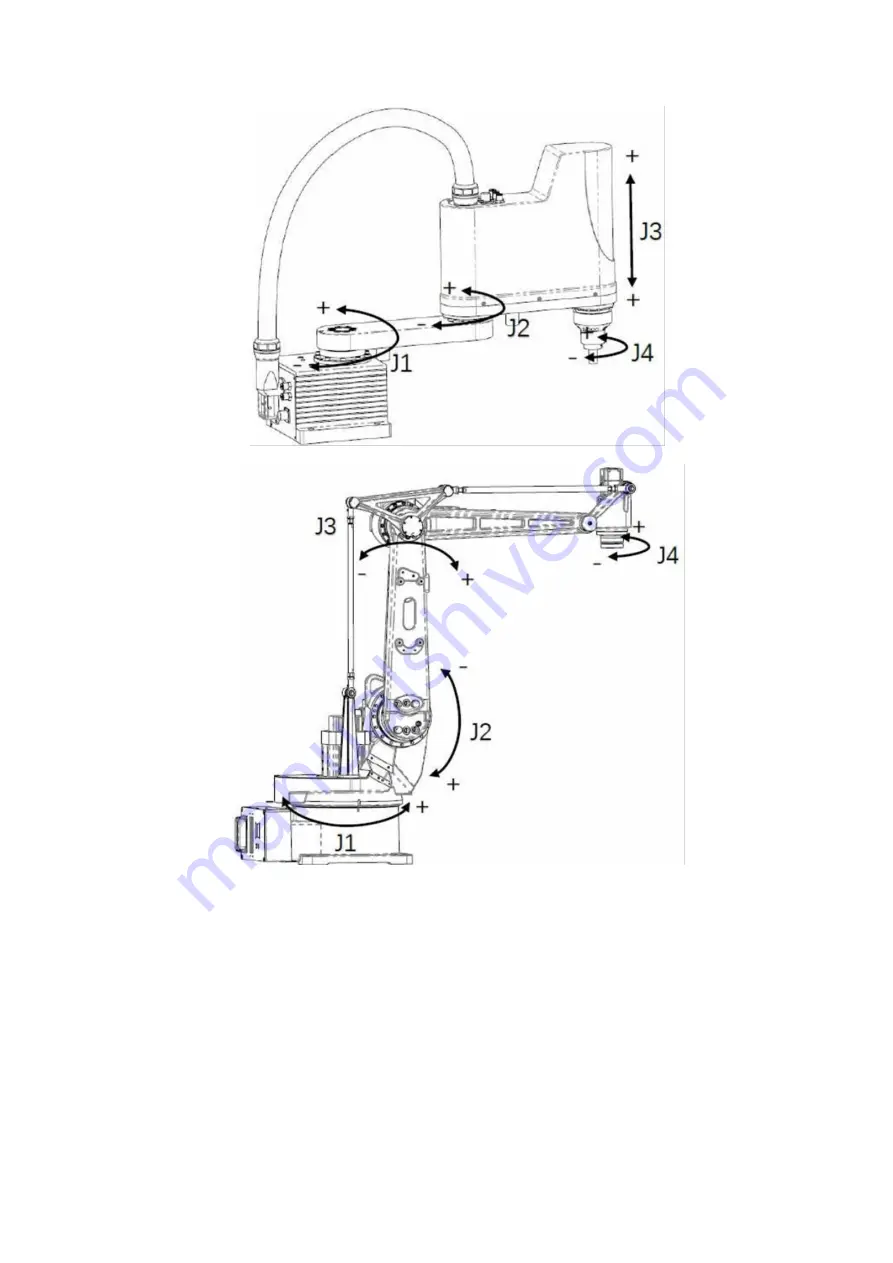
Fig. 2-2 SCARA (STH030-500) movement diagram of each axis
Figure 2-3 Schematic diagram of the movement of each axis of the palletizing robot (TKB4600)
Note: The definition of the movement direction of each joint follows the right-hand
rule. That is: the right hand is holding the joint rotation axis, and the thumb is in the
positive direction of the world coordinates (see 2.2.1). The direction of the four fingers is
the positive direction of rotation, and the reverse direction is the negative direction of
rotation.
2.2 Robot coordinate system
In teach mode, the robot axis movement is related to the currently selected coordinate
system. Turing robot supports 4 kinds of coordinate systems: joint coordinate system,
rectangular coordinate system, tool coordinate system user coordinate system.
◆
Joint coordinate system
Each axis of the robot moves independently and becomes the joint coordinate system.







































































