Installing the System
MicronNav System
0656-SOM-00001-07
13
© Tritech International Ltd.
24.0
56 A/F
Ø50
66
Ø49
Ø56
76
16
26
24
.0
4 OFF M3 x 0.5
4.5
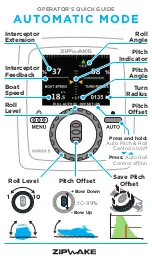
3.1.3. Mounting the Surface USBL Dunking Transducer
The USBL Dunking Transducer should be mounted from the fixed platform/dockside or
mobile platform/vessel such that the transducer head is at least 1m to 2m below the surface
of the water and at least 1m to 2m away from the dock wall or vessel, if operating from a
vessel it may be difficult to achieve 1m to 2m clearance from the side so in this case lower
the head deeper to ensure a clearance of 1m to 2m below the bottom of the hull.
Caution
The depth of the head must not exceed 10m. Also, when installing on a vessel it
is important to ensure the head is mounted clear of any propellers or thrusters.
The USBL Dunking Transducer contains an integral Magnetic Heading and Pitch/Roll Sensor
that enables the MicronNav Seanet application software running on the surface computer
to make corrections to world axis, this is particularly effective when operating from a non-
magnetic mobile platform/vessel or fixed dockside.
When operating from a steel hull vessel the integral sensor will be affected by magnetic
interference from the vessel and it is recommended in this type of installation that an external
Ships Compass & Motion Reference Unit (MRU) is used to provide the Heading and Pitch/
Roll information, details of how to connect and use an external Compass & MRU sensor can
be found in Section 3.2.7, “Connecting optional third party High Accuracy Heading/Pitch/Roll