





















TMCM-078 Manual (V1.03 / September 10th, 2008)
20
Copyright © 2008, TRINAMIC Motion Control GmbH & Co. KG
5.3.2
Step
Description:
The Step signal controls the velocity and acceleration of the motor. The velocity depends
on the frequency, the acceleration on the change of the frequency. One step impulse represents one
microstep.
Calculation of rotations per second:
]
s
/
rotations
[
resolution
Microstep
Fullsteps
frequency
input
Step
]
s
/
rotations
[
v
Maximum frequency at screw connector (decoupled by opto couplers):
The maximum Step input
frequency is 350 kHz, aligned to the Direction signal. It is limited by the switching capabilities of the
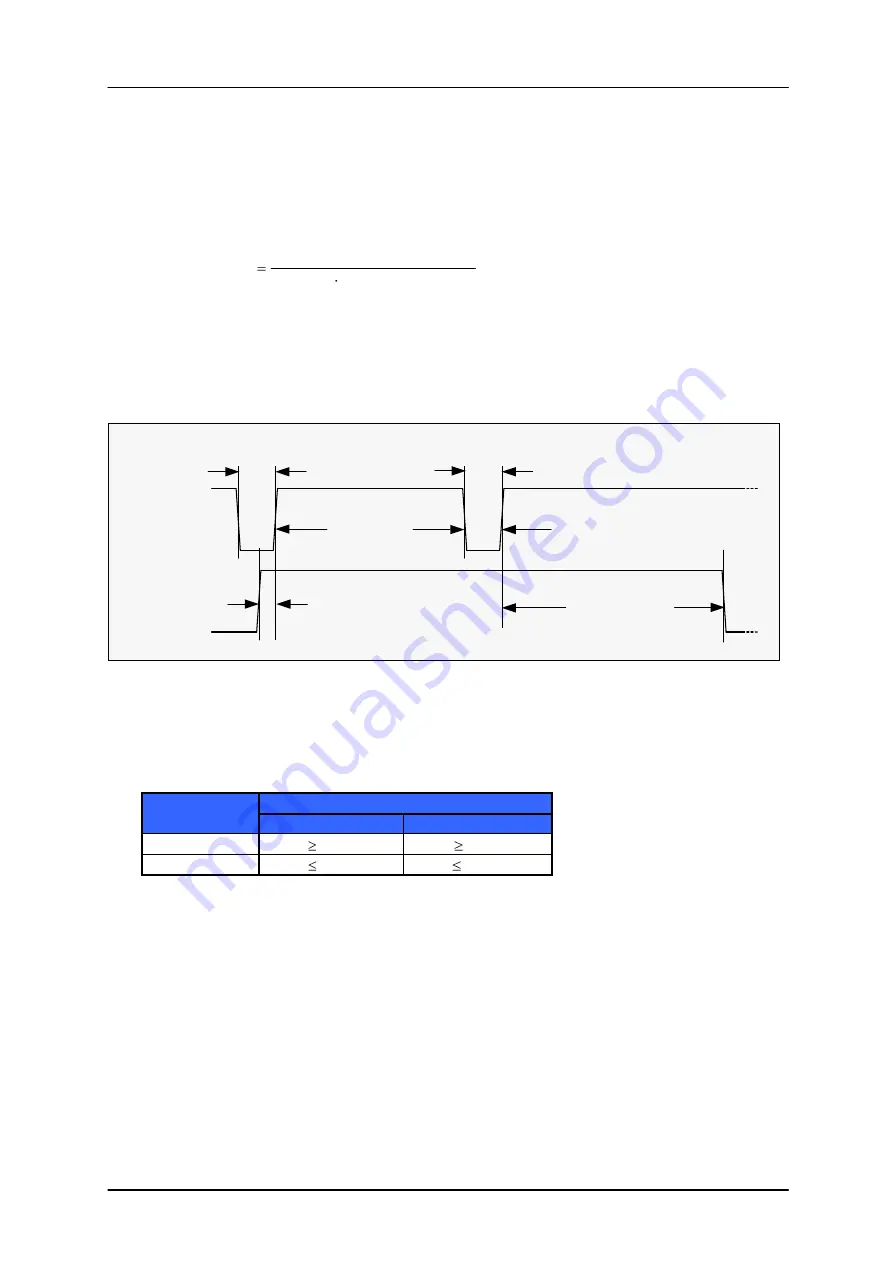
optocouplers. The minimum logic ”0” time is 0.7 µs and the minimum logic “1” time is 2.0 µs. A step
is triggered by the positive going edge of the signal (switching off of opto coupler).
Maximum frequency at a duty cycle of 1 (“0” time is 2.0 µs and “1” time is 2.0 µs) is 250 kHz.
step pulse
direction
0.7µs min
2.0µs min
0.7µs min
t
DIRHOLD
t
DIRSETUP
Figure 5.3: Step and Direction Signal (schematically, optocoupler input at screw connector)
Maximum frequency at JST connector:
Even higher than at screw connector. Limited by
microcontroller but not yet evaluated (approximately 300 kHz without microstep loss).
Function Table:
Step signal
Differential signal
Screw connector
JST connector
high
3.5 V
0.4 V
low
2.0 V
-0.4 V
5.4
RS485 interface
The RS485 interface can control all functions of the TMCM-078. It is possible to change parameters,
with this interface which are also valid in the other modes like max. velocity or acceleration. Most of
the parameters that can be change by the RS485 commands (except those that are set by the DIP
switches) can also be stored in the FlashROM of the module.
The factory default address setting is “A” and the default baud rate is 9600 baud. Use an appropriate
RS485 interface (like Trinamic USB-2-485) to enter RS485 commands using a terminal program (e.g.
Hyperterminal that is shipped with Windows).
Many commands are the same as those used on the TMCM-013 and IDX modules, but some
commands are different. Also the parameter ranges of many commands are different from those on
the TMCM-013 and IDX modules.