





























51
T-Cube Stepper Motor Controller
link. The homing parameters and limit switch settings described previously are good
examples of settings that can be altered and then persisted in the driver for use in
absence of a PC. To save the settings to hardware, check the ‘Persist Settings to
Hardware’ checkbox before clicking the ‘OK button.
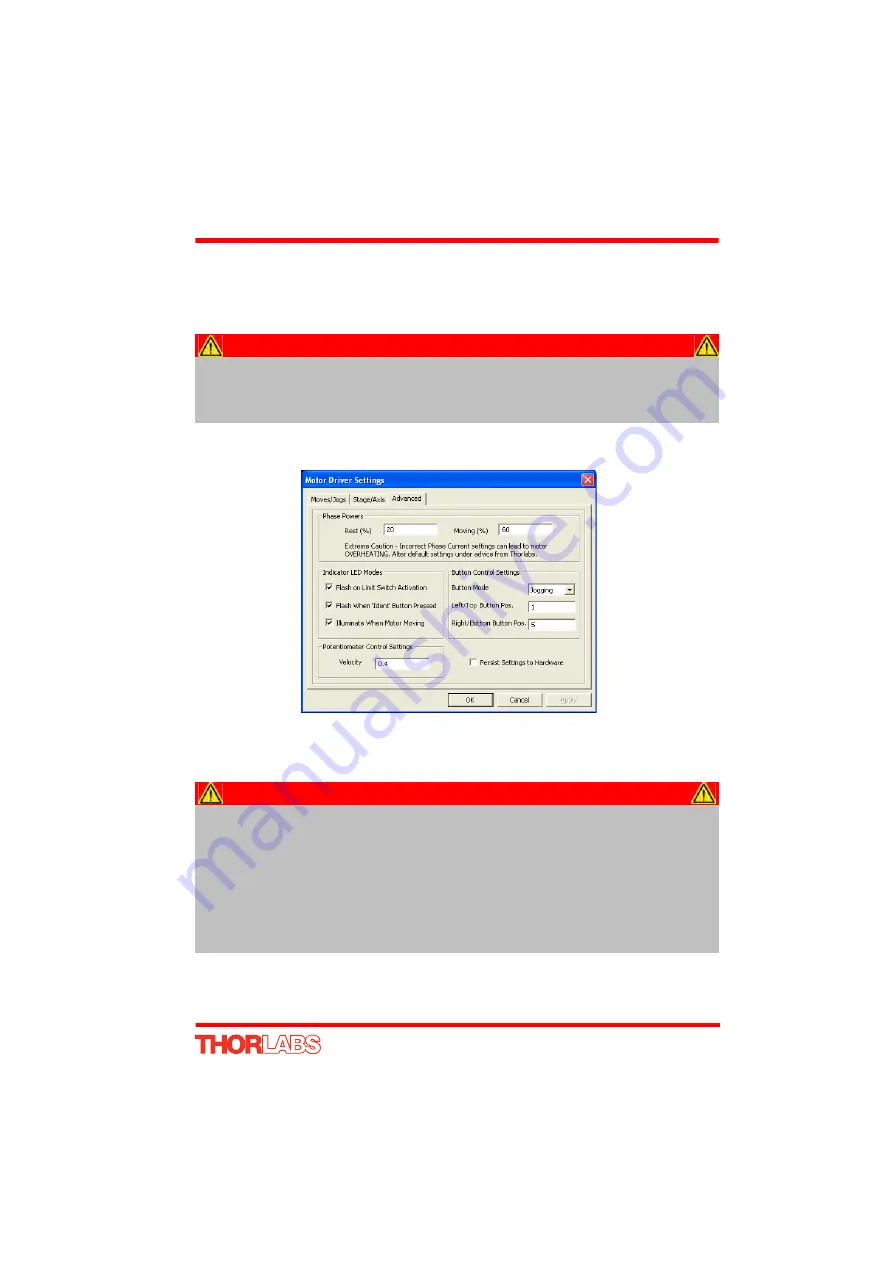
6.3.3 Advanced Tab
Fig. 6.5 Stepper Driver T-Cube - Advanced Settings
Phase Powers
The Stepper Driver T-Cube is designed to vary the phase powers (current) in the
motor coils depending on the operating state of the motor - moving or stationary.
Typically, when a stepper motor is at rest it is advisable to reduce the phase (holding)
Caution
The ‘Persist Settings’ functionality is provided to simplify use of the unit
in the absence of a PC. When the unit is connected to a PC and is
operated via APTUser, the default APTServer settings will be loaded at
boot up, even if the ‘Persist Settings’ option has been checked.
Warning
The default values applied by the software have been selected based on
the type of stage or actuator connected and are applied automatically on
start up.
Modify these values with caution as the risk of damage to the motor due
to overheating is significant. For the Thorlabs ZST series actuators, the
moving phase power is set to 60% at the factory. This is appropriate for
velocities of 0 to 250 µm/s. If higher speeds are required, this value can
be increased up to 80% but this could result in serious overheating if the
motor is then moved at low speeds.





















































