35
MLJ050 Motorized Lab Jack
Appendix C
Stepper Motor Operation
C.1
How A Stepper Motor Works
C.1.1
General Principle
Thorlabs’ actuators use a stepper motor to drive a precision lead screw.
Stepper motors operate using the principle of magnetic attraction and repulsion to
convert digital pulses into mechanical shaft rotation. The amount of rotation achieved
is directly proportional to the number of input pulses generated and the speed is
proportional to the frequency of these pulses. A basic stepper motor has a permanent
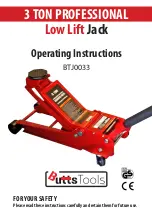
magnet and/or an iron rotor, together with a stator. The torque required to rotate the
stepper motor is generated by switching (commutating) the current in the stator coils
as illustrated in Fig. C.1.
Fig. C.1 Simplified concept of stepper motor operation
Although only 4 stator poles are shown above, in reality there are numerous tooth-like
poles on both the rotor and stator. The result is that positional increments (steps) of
1.8 degrees can be achieved by switching the coils (i.e. 200 steps per revolution). If
the current through one coil is increased as it is decreased in another, the new rotor
position is somewhere between the two coils and the step size is a defined fraction of
a full step (microstep).
The size of the microstep depends on the resolution of the driver electronics. The
integral driver of the MLJ050 lab jack gives a smallest angular adjustment of 0.000879
degrees (i.e. 1.8/0.000879 = 2048 microsteps per full step), resulting in a resolution
of 409,600 microsteps per revolution of the motor.
In practise, the mechanical resolution achieved by the system may be coarser than a
single microstep, primarily because there may be a small difference between the
orientation of the magnetic field generated by the stator and the orientation in which
the rotor comes to rest.
N
S
on
on
N
S
on
on
Summary of Contents for Kinesis MLJ050
Page 1: ...MLJ050 Motorized Lab Jack Kinesis User Guide Original Instructions ...
Page 42: ...42 D 3 CE Certificate ...
Page 43: ...43 ...