






















Block diagram
L6470
8/64
Doc ID 16737 Rev 2
1 Block
diagram
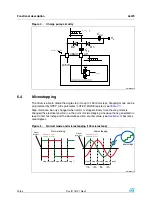
Figure 1.
Block diagram
AM02
3
77v1
3
V
Volt
a
ge Reg.
ADC
Ext. O
s
c. driver
&
Clock gen.
16MHz
O
s
cill
a
tor
Ch
a
rge
p
u
mp
V
DD
S
PI
Regi
s
ter
s
Control
Logic
C
u
rrent DAC
s
&
Comp
a
r
a
tor
s
Temper
a
t
u
re
s
en
s
ing
C
u
rrent
s
en
s
ing
S
TBY/R
S
T
FLAG
C
S
CK
S
DO
S
DI
BU
S
Y/
S
YNC
S
W
S
TCK
DGND
VDD
O
S
CIN
O
S
COUT ADCIN
VREG
CP
VBOOT
AGND
PGND
PGND
V
S
A
V
S
A
OUT1A
OUT2A
V
S
B
V
S
B
OUT1B
OUT2B
H
S
A1
L
S
A1
H
S
A2
L
S
A2
H
S
B1
L
S
B1
H
S
B2
L
S
B2
H
S
A1
L
S
A1
H
S
A2
L
S
A2
H
S
B1
L
S
B1
H
S
B2
L
S
B2
V
DD
V
b
oot
V
b
oot
V
b
oot
V
b
oot







































































